Circuito risonante invece di PWM. Modulazione ampiezza impulsi, PWM, PWM, controllo, regolazione, regolatore, modulatore
8. Modulazione dell'ampiezza dell'impulso nei convertitori
8.1. Informazione Generale
I principi del controllo e della modulazione degli impulsi sono discussi nel Cap. 4 sull'esempio del più semplice circuito regolatore DC. Allo stesso tempo, vengono fornite definizioni per i principali tipi di modulazione di impulsi utilizzati nella teoria dei sistemi di impulsi lineari, che corrispondono alla pratica del controllo di convertitori CC pulsati.
Tuttavia, la modulazione dell'ampiezza dell'impulso di tensioni o correnti nei convertitori CA ha una definizione leggermente diversa nell'elettronica di potenza, tenendo conto delle caratteristiche del PWM quando si risolvono i problemi di conversione dell'elettricità in corrente alternata. Come definito dalla norma IEC 551-16-30, Pulse Width Modulation si riferisce al controllo dell'impulso in cui l'ampiezza o la frequenza degli impulsi, o entrambe, sono modulate entro un periodo della frequenza fondamentale al fine di creare una forma particolare della forma d'onda della tensione di uscita . Nella maggior parte dei casi, il PWM viene eseguito per garantire una tensione o corrente sinusoidale, cioè per ridurre il livello delle armoniche superiori rispetto alla (prima) armonica fondamentale, ed è detto sinusoidale. Esistono i seguenti metodi principali per garantire la sinusoidalità: PWM analogico e sue modifiche; soppressione selettiva (selettiva) delle armoniche superiori; isteresi o modulazione delta;
modulazione del vettore spaziale.
L'opzione classica per organizzare un PWM sinusoidale analogico consiste nel modificare l'ampiezza degli impulsi che formano la tensione di uscita (corrente) confrontando un segnale di tensione di una determinata forma, chiamato riferimento o riferimento, con un segnale di tensione triangolare che ha una maggiore frequenza ed è chiamato segnale portante. Il segnale di riferimento è modulante e determina la forma richiesta della tensione di uscita (corrente). Ci sono molte modifiche di questo metodo, in cui i segnali modulanti sono rappresentati da funzioni speciali diverse da una sinusoide. Le dispense tratteranno diversi circuiti di base che spiegano questi metodi PWM.
Il metodo di soppressione selettiva delle armoniche superiori è attualmente implementato con successo per mezzo di controllori a microprocessore basati su software. La modulazione dell'isteresi si basa sui principi del relè che "segue" un segnale di riferimento, ad esempio una forma d'onda sinusoidale. Nella più semplice implementazione tecnica, questo metodo combina i principi di PWM e PFM (modulazione di frequenza degli impulsi). Tuttavia, mediante speciali accorgimenti circuitali, è possibile stabilizzare la frequenza di modulazione o limitarne il range di variazione.
Il metodo della modulazione del vettore spaziale si basa sulla conversione di un sistema di tensione trifase in uno bifase e sull'ottenimento di un vettore spaziale generalizzato. Il valore di questo vettore viene calcolato a volte determinato dalle frequenze fondamentali e modulanti. È considerato molto promettente per il controllo di inverter trifase, in particolare, se utilizzato in un azionamento elettrico. Allo stesso tempo, è per molti versi simile al tradizionale PWM a onda sinusoidale.
I sistemi di controllo basati su PWM consentono non solo di fornire una forma sinusoidale dei valori medi dell'armonica fondamentale di tensione o corrente, ma anche di controllare i valori della sua ampiezza, frequenza e fase. Poiché in questi casi il convertitore utilizza interruttori completamente controllati, diventa possibile implementare il funzionamento dei convertitori AC (DC) insieme alla rete AC in tutti e quattro i quadranti sia in modalità rettificante che invertente con un dato valore del fattore di potenza fondamentale cosφ in gamma da -1 a 1. Inoltre, con un aumento della frequenza portante, si espandono le possibilità di riprodurre in uscita inverter di corrente e tensione di una determinata forma. Ciò consente di creare filtri attivi per sopprimere le armoniche più alte.
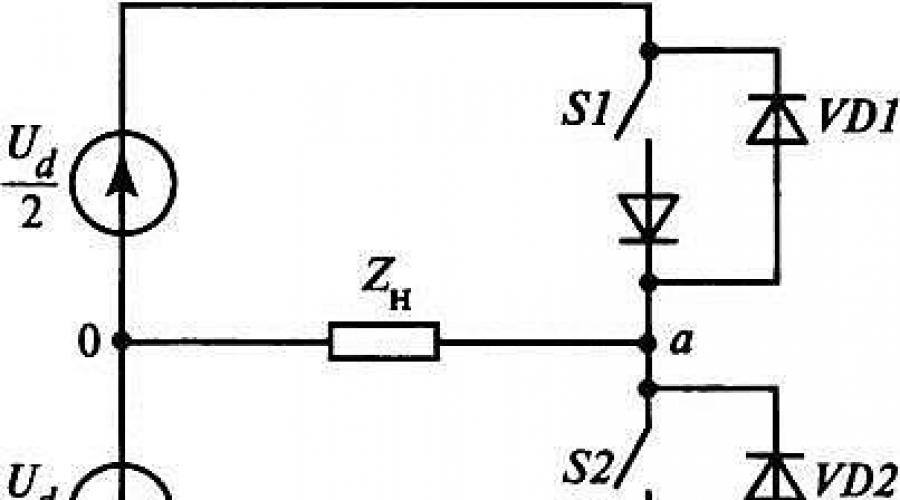
Considereremo le principali definizioni utilizzate nell'ulteriore presentazione utilizzando l'esempio dell'applicazione del primo metodo in un circuito a semiponte monofase di un inverter di tensione (Fig. 8.1, un). In questo schema condizionale, le chiavi S1 e S2 sono rappresentati da elementi di commutazione completamente controllati, integrati da diodi collegati in serie e in parallelo con essi. I diodi seriali riflettono la conduzione unidirezionale delle chiavi (ad esempio transistor o tiristori), mentre i diodi paralleli forniscono la conduzione di correnti inverse con un carico induttivo attivo.
Diagrammi del riferimento, modulanti tu M (θ) e portante tu I segnali H (θ) sono mostrati in fig. 8.1, b. Generazione di impulsi di controllo chiave S 1 e S 2 si realizza secondo il seguente principio. In tu M (θ) > tu Tasto H(θ). S 1 è acceso, a S 2 spento. In tu M(θ)< tu H (θ) gli stati dei tasti sono invertiti: S 2 - abilitato, a S 1 - spento. Pertanto, all'uscita dell'inverter si forma una tensione sotto forma di due impulsi polari. Nei circuiti reali, per escludere la conduzione simultanea delle chiavi S 1 e S 2, dovrebbe essere previsto un certo ritardo tra i momenti di generazione dei segnali per accendere queste chiavi. Ovviamente, l'ampiezza dell'impulso dipende dal rapporto tra le ampiezze del segnale tu M (θ) e tu H(θ). Il parametro che caratterizza questo rapporto è chiamato indice di modulazione di ampiezza ed è determinato dalla formula (8.1):
, (8.1.)
dove u Mm e u H m - valori massimi del segnale modulante tu M (θ) e segnale portante tu H(θ), rispettivamente.


Riso. 8.1. Inverter di tensione semiponte monofase: un- schema; b– diagrammi di tensione per la modulazione degli impulsi
Frequenza portante tu H (θ) è uguale alla frequenza di commutazione f Tasti H S 1 e S 2 e di solito supera significativamente la frequenza del segnale modulante f M. Rapporto di frequenza f Mano f M è un importante indicatore dell'efficienza del processo di modulazione ed è chiamato indice di modulazione di frequenza, che è determinato dalla formula (8.2):
Per piccoli valori M f segnali tu M (θ) e tu H (θ) deve essere sincronizzato per evitare subarmoniche indesiderate. B come valore massimo Mio, che determina la necessità di sincronizzazione, è impostato M f = 21. Ovviamente con segnali sincronizzati e coefficiente M fè una costante.
Dal diagramma di fig. 8.1 si può notare che l'ampiezza della prima armonica della tensione di uscita u em 1, tenuto conto della (8.1), può essere rappresentato nella seguente forma (8.3):
![]() (8.3)
(8.3)
Secondo (8.3) per M a = 1 l'ampiezza della prima armonica della tensione di uscita è uguale all'altezza del rettangolo della semionda u d/2. La caratteristica dipendenza del valore relativo della prima armonica della tensione di uscita dal valore di M a è mostrata in fig. 8.2, che mostra che il cambiamento M a da 0 a 1 è lineare e dipende dall'ampiezza u sono 1. Valore limite M a è determinato dal principio del tipo di modulazione in esame, secondo il quale il valore massimo u am 1 è limitato dall'altezza di una semionda rettangolare uguale a u d/2. Con un ulteriore aumento del coefficiente M una modulazione porta ad un aumento non lineare dell'ampiezza u am 1 al valore massimo determinato dalla formazione di una tensione ad onda quadra all'uscita dell'inverter, che successivamente rimane invariata.
L'espansione di una funzione rettangolare in una serie di Fourier fornisce il valore massimo (8.4):
![]() (8.4)
(8.4)
Questo valore è limitato dal valore dell'indice M a, variabile nell'intervallo da 0 a circa 3. È ovvio che la funzione sull'intervallo a-b dei valori da 1 a 3.2 non è lineare (Fig. 8.2). La modalità di funzionamento in questa sezione è chiamata su modulazione.
Significato M f determinato dalla scelta della frequenza del segnale portante tu H (θ) e influisce in modo significativo sulle caratteristiche tecniche del convertitore. All'aumentare della frequenza aumentano le perdite di commutazione negli interruttori di potenza dei convertitori, ma allo stesso tempo migliora la composizione spettrale della tensione di uscita e viene semplificata la soluzione del problema del filtraggio delle armoniche superiori dovute al processo di modulazione. Un fattore importante nella scelta del valore f H in molti casi è la necessità di garantire il suo valore nella gamma di frequenze audio superiore a 20 kHz. Quando si sceglie f H dovrebbe anche tenere conto del livello delle tensioni operative del convertitore, della sua potenza e di altri parametri.

Riso. 8.2. Dipendenza del valore relativo dell'ampiezza dell'armonica fondamentale della tensione di uscita dall'indice di modulazione dell'ampiezza per un circuito a semiponte monofase
La tendenza generale qui è un aumento dei valori di M f convertitori di bassa potenza e bassa tensione e viceversa. Scelta del poeta M fè un problema di ottimizzazione multiobiettivo.
Modulazione degli impulsi con processo stocastico. L'uso di PWM nei convertitori è associato alla comparsa di armoniche più elevate in tensioni e correnti modulate. Inoltre, nella composizione spettrale di questi parametri, le armoniche più significative si verificano a frequenze multiple dell'indice di modulazione di frequenza M f e armoniche raggruppate intorno a loro a frequenze laterali con ampiezze decrescenti. Armoniche superiori possono dar luogo ai seguenti problemi principali:
il verificarsi di rumore acustico;
deterioramento della compatibilità elettromagnetica (EMC) con altri dispositivi o sistemi elettrici.
Le principali fonti di rumore acustico sono i componenti elettromagnetici (bobine di arresto e trasformatori), che risentono di correnti e tensioni contenenti armoniche superiori con frequenze nella gamma audio. Va notato che il rumore può verificarsi a determinate frequenze, dove le armoniche più alte sono al massimo. Fattori che causano rumore, come il fenomeno della magnetostrizione, complicano la risoluzione del problema EMC. I problemi EMC possono verificarsi su un'ampia gamma di frequenze, a seconda della gravità del livello di interferenza elettromagnetica dei dispositivi elettrici. Tradizionalmente, sono state utilizzate soluzioni progettuali e tecnologiche per ridurre i livelli di rumore e filtri passivi sono stati utilizzati per garantire la compatibilità elettromagnetica.
I metodi associati alla modifica della natura della composizione spettrale delle tensioni e delle correnti modulate sono considerati una direzione promettente per risolvere questi problemi. L'essenza di questi metodi è equalizzare lo spettro di frequenza e ridurre l'ampiezza delle armoniche pronunciate a causa della loro distribuzione stocastica su un'ampia gamma di frequenze. Questa tecnica è talvolta chiamata "sbavatura" dello spettro di frequenza. La concentrazione di energia di interferenza diminuisce alle frequenze in cui le armoniche possono essere al massimo. L'implementazione di questi metodi non è correlata all'impatto sui componenti della parte di potenza dei convertitori e nella maggior parte dei casi è limitata da strumenti software con una leggera modifica del sistema di controllo.
Consideriamo brevemente i principi di attuazione di questi metodi. PWM si basa sulla variazione del duty cycle γ= t e / T n, dove t u - durata dell'impulso; T n- il periodo della sua formazione. Di solito questi valori, così come la posizione dell'impulso sull'intervallo del periodo T n sono costanti in regime stazionario. I risultati PWM sono definiti come valori medi integrali. In questo caso, i valori deterministici di t e inclusa la posizione dell'impulso provocano una composizione spettrale sfavorevole dei parametri modulati. Se a queste quantità viene assegnato un carattere casuale pur mantenendo il valore dato di γ, allora i processi diventano stocastici e la composizione spettrale dei parametri modulati cambia. Ad esempio, un carattere così casuale può essere assegnato alla posizione dell'impulso t e sull'intervallo di periodo T n o fornire un cambiamento stocastico di quest'ultimo. A tale scopo può essere utilizzato un generatore di numeri casuali, che agisce sul generatore di frequenza di modulazione master f n =1/T n. Allo stesso modo, è possibile modificare la posizione dell'impulso sull'intervallo T n con aspettativa matematica uguale a zero. Il valore integrale medio γ deve rimanere al livello impostato dal sistema di controllo, per cui la composizione spettrale delle armoniche superiori nelle tensioni e correnti modulate sarà equalizzata.
Domande per l'autocontrollo
1. Elencare i principali metodi PWM per fornire una corrente o una tensione sinusoidale.
2. Qual è la differenza tra modulazione di tensione unipolare e bipolare?
3. Elencare i principali parametri PWM.
4. Qual è lo scopo dell'utilizzo di PWM con processi stocastici?
La modulazione di larghezza di impulso (PWM) è un metodo di conversione del segnale in cui la durata dell'impulso (ciclo di lavoro) cambia, mentre la frequenza rimane costante. Nella terminologia inglese, è indicato come PWM (modulazione della larghezza di impulso). In questo articolo capiremo in dettaglio cos'è il PWM, dove viene utilizzato e come funziona.
Area di applicazione
Con lo sviluppo della tecnologia dei microcontrollori, si sono aperte nuove opportunità per PWM. Questo principio è diventato la base per i dispositivi elettronici che richiedono sia la regolazione dei parametri di uscita che il loro mantenimento a un determinato livello. Il metodo di modulazione della larghezza di impulso viene utilizzato per modificare la luminosità della luce, la velocità di rotazione dei motori e per controllare il transistor di potenza degli alimentatori (PSU) di tipo pulsato.
La modulazione della larghezza di impulso (PW) viene utilizzata attivamente nella costruzione di sistemi di controllo della luminosità dei LED. A causa della bassa inerzia, il LED ha il tempo di commutare (lampeggia e si spegne) a una frequenza di diverse decine di kHz. Il suo funzionamento in modalità pulsata è percepito dall'occhio umano come un bagliore costante. A sua volta, la luminosità dipende dalla durata dell'impulso (lo stato di apertura del LED) durante un periodo. Se il tempo dell'impulso è uguale al tempo di pausa, ovvero il duty cycle è del 50%, la luminosità del LED sarà la metà del valore nominale. Con la diffusione delle lampade a LED da 220 V, è sorta la domanda di aumentare l'affidabilità del loro funzionamento con una tensione di ingresso instabile. La soluzione è stata trovata sotto forma di un microcircuito universale: un driver di potenza che opera secondo il principio della modulazione della larghezza dell'impulso o della frequenza dell'impulso. Viene descritto in dettaglio un circuito basato su uno di questi driver.
La tensione di rete fornita all'ingresso del microcircuito del driver viene costantemente confrontata con la tensione di riferimento nel circuito, formando all'uscita un segnale PWM (PFM), i cui parametri sono impostati da resistori esterni. Alcuni microcircuiti hanno un'uscita per fornire un segnale di controllo analogico o digitale. Pertanto, il funzionamento del driver di impulsi può essere controllato utilizzando un altro convertitore SHI. È interessante notare che il LED non riceve impulsi ad alta frequenza, ma una corrente attenuata da un'induttanza, che è un elemento indispensabile di tali circuiti.
L'uso massiccio di PWM si riflette in tutti i pannelli LCD con retroilluminazione a LED. Sfortunatamente, nei monitor a LED, la maggior parte dei convertitori SHI funziona a una frequenza di centinaia di Hertz, il che influisce negativamente sulla visione degli utenti di PC.
Il microcontrollore Arduino può funzionare anche in modalità controller PWM. Per fare ciò, chiama la funzione AnalogWrite () con i valori tra 0 e 255 indicati tra parentesi.Zero corrisponde a 0V e 255 a 5V. I valori intermedi sono calcolati proporzionalmente.
L'ubiquità dei dispositivi che funzionano secondo il principio PWM ha consentito all'umanità di allontanarsi dagli alimentatori a trasformatore di tipo lineare. Di conseguenza, un aumento dell'efficienza e una diminuzione del peso e delle dimensioni dei generatori di diverse volte.
Il controller PWM è parte integrante di un moderno alimentatore switching. Controlla il funzionamento del transistor di potenza situato nel circuito primario del trasformatore di impulsi. A causa della presenza di un circuito di feedback, la tensione all'uscita dell'alimentatore rimane sempre stabile. La minima deviazione della tensione di uscita attraverso il feedback è fissata da un microcircuito, che corregge istantaneamente il ciclo di lavoro degli impulsi di controllo. Inoltre, un moderno controller PWM risolve una serie di compiti aggiuntivi che migliorano l'affidabilità dell'alimentatore:
- prevede la modalità di soft start del convertitore;
- limita l'ampiezza e il ciclo di lavoro degli impulsi di controllo;
- controlla il livello di tensione in ingresso;
- protegge da cortocircuito e sovratemperatura dell'interruttore di alimentazione;
- mette il dispositivo in modalità standby, se necessario.
Il principio di funzionamento del controller PWM
Il compito del controller PWM è controllare l'interruttore di alimentazione modificando gli impulsi di controllo. Quando si opera in modalità chiave, il transistor si trova in uno dei due stati (completamente aperto, completamente chiuso). Nello stato chiuso, la corrente attraverso la giunzione p-n non supera alcuni μA, il che significa che la potenza di dissipazione tende a zero. Allo stato aperto, nonostante l'elevata corrente, la resistenza della giunzione p-n è eccessivamente bassa, il che porta anche a perdite di calore insignificanti. La maggior quantità di calore viene rilasciata nel momento del passaggio da uno stato all'altro. Ma a causa del breve tempo del processo di transizione rispetto alla frequenza di modulazione, la perdita di potenza durante la commutazione è trascurabile.
La modulazione dell'ampiezza dell'impulso è divisa in due tipi: analogica e digitale. Ciascuno dei tipi ha i suoi vantaggi e può essere implementato in circuiti in modi diversi.
PWM analogico
Il principio di funzionamento di un modulatore SHI analogico si basa sul confronto di due segnali la cui frequenza differisce di diversi ordini di grandezza. L'elemento di confronto è un amplificatore operazionale (comparatore). A uno dei suoi ingressi viene applicata una tensione a dente di sega ad alta frequenza costante e all'altro viene alimentata una tensione modulante a bassa frequenza con ampiezza variabile. Il comparatore confronta entrambi i valori e genera impulsi rettangolari in uscita, la cui durata è determinata dal valore corrente del segnale modulante. In questo caso, la frequenza PWM è uguale alla frequenza del segnale a dente di sega.
PWM digitale
La modulazione dell'ampiezza dell'impulso nell'interpretazione digitale è una delle tante funzioni del microcontrollore (MC). Operando esclusivamente con dati digitali, l'MK può generare un livello di tensione alto (100%) o basso (0%) alle sue uscite. Tuttavia, nella maggior parte dei casi, per controllare efficacemente il carico, è necessario modificare la tensione all'uscita dell'MK. Ad esempio, regolando la velocità di rotazione del motore, modificando la luminosità del LED. Cosa fare per ottenere un valore di tensione compreso tra 0 e 100% all'uscita del microcontrollore?
Il problema viene risolto utilizzando il metodo della modulazione della larghezza di impulso e utilizzando il fenomeno del sovracampionamento, quando la frequenza di commutazione specificata è diverse volte superiore alla risposta del dispositivo controllato. Modificando il duty cycle degli impulsi, cambia il valore medio della tensione di uscita. Di norma, l'intero processo avviene a una frequenza da decine a centinaia di kHz, il che consente di ottenere una regolazione regolare. Tecnicamente, questo viene implementato utilizzando un controller PWM, un microcircuito specializzato, che è il "cuore" di qualsiasi sistema di controllo digitale. L'uso attivo dei controller basati su PWM è dovuto ai loro innegabili vantaggi:
- alta efficienza di conversione del segnale;
- stabilità del lavoro;
- risparmio energetico consumato dal carico;
- a basso costo;
- alta affidabilità dell'intero dispositivo.
Esistono due modi per ottenere un segnale PWM ai pin del microcontrollore: hardware e software. Ogni MK ha un timer integrato in grado di generare impulsi PWM su determinati pin. In questo modo si ottiene l'implementazione hardware. Ottenere un segnale PWM utilizzando i comandi del software ha più opzioni in termini di risoluzione e consente di utilizzare più pin. Tuttavia, il metodo software porta a un carico elevato dell'MK e occupa molta memoria.
È interessante notare che nel PWM digitale il numero di impulsi per periodo può essere diverso e gli impulsi stessi possono essere localizzati in qualsiasi parte del periodo. Il livello del segnale di uscita è determinato dalla durata totale di tutti gli impulsi per periodo. Dovrebbe essere chiaro che ogni impulso aggiuntivo è una transizione del transistor di potenza dallo stato aperto allo stato chiuso, il che porta ad un aumento delle perdite durante la commutazione.
Un esempio di utilizzo di un controller PWM
Una delle opzioni di implementazione per un semplice controller PWM è già stata descritta in precedenza in. È costruito sulla base di un microcircuito e ha una piccola reggetta. Ma, nonostante la semplicità del circuito, il regolatore ha una gamma di applicazioni abbastanza ampia: circuiti di controllo per la luminosità dei LED, strisce LED, regolazione della velocità di rotazione dei motori CC.
Leggi anche
Con PWM, il segno del segnale di modellazione analogica b(t) (Figura A) cambia la larghezza (durata dell'impulso (c)) della sottoportante con un'ampiezza e una frequenza di ripetizione costanti.
PWM è talvolta chiamato DIM a modulazione di impulso lungo.
Distinguere PWM ONE-SIDE e DOUBLE-SIDE.
Con PWM unilaterale, la variazione dell'ampiezza dell'impulso si verifica solo a causa dello spostamento dell'interruzione dell'impulso (PWM-1) (Figura B)
E con un taglio su entrambi i lati e la parte anteriore dell'impulso PWM-2 (Figura D)
Il PWM-1 più utilizzato

E assumeremo che il segnale di modellazione
cambia secondo la legge armonica, secondo la quale
l'ampiezza dell'impulso è:
Dove  - deviazione della durata dell'impulso
- deviazione della durata dell'impulso
Sostituendo questo valore  al precedente
al precedente
espressione otteniamo il segnale spettrale del segnale PWM.
È più conveniente eseguire un modulatore di segnale PWM su circuiti integrati (CI)

L'ingresso 2 è alimentato con una sottoportante a impulsi
Ingresso 5 – segnale di modellazione analogico b(t)
Il demodulatore PWM è spesso LPF
27. Modulazione fase-impulso. Modulatori di segnale PIM.
Con il PIM, secondo la legge del segnale analogico simulato b(t), cambia solo la posizione temporale degli impulsi video della sottoportante, mentre la loro ampiezza e durata rimangono invariate.
Se si differenzia il segnale PWM nel tempo, si ottengono impulsi positivi e negativi.
Un impulso positivo corrisponde alla parte anteriore del segnale PWM e un impulso negativo corrisponde al suo taglio.
Con PWM unidirezionale, gli impulsi positivi sono stazionari e quelli negativi sono spostati in proporzione al segnale di modellazione b(t) lungo l'asse del tempo.
Gli impulsi stazionari possono essere eliminati con un raddrizzatore resistivo a semionda e gli impulsi rimanenti sono segnali PPM.
Il modulatore di segnale PWM in questo caso è costituito da un modulatore PWM all'uscita del quale sono collegati un dispositivo di differenziazione DU e un raddrizzatore a semionda OB. (Guarda l'immagine)

L'espressione analitica del segnale PIM ha la forma:

 - ampiezza dell'impulso
- ampiezza dell'impulso
 -funzione che descrive l'inviluppo dell'impulso di misura.
-funzione che descrive l'inviluppo dell'impulso di misura.
 - deviazione della posizione temporale dell'impulso di misura
- deviazione della posizione temporale dell'impulso di misura
 - il valore del messaggio trasmesso al momento
- il valore del messaggio trasmesso al momento 
Lo spettro di frequenza dei segnali PIM è analiticamente difficile da rappresentare
Il valore approssimativo dell'ampiezza del segnale armonico trasmesso nello spettro PIM è:

Dove  - frequenza dei messaggi
- frequenza dei messaggi
 - durata dell'impulso
- durata dell'impulso
L'ampiezza del segnale trasmesso nello spettro PWM è molto piccola (molto più piccola rispetto agli spettri AIM e PWM ed è una funzione della frequenza di modellazione  , cioè distorto).
, cioè distorto).
Pertanto, la demodulazione dei segnali PPM con un filtro passa basso non è direttamente possibile.
Vengono convertiti in segnali AIM o PWM.
28. Modulazione frequenza-impulso. Rilevatori di segnali chim.
Il rivelatore può essere realizzato secondo lo schema
Dove F- filtro canale; JSC- limitatore di ampiezza; DC-diff. catena; DV-raddrizzatore a due semionde con carico attivo; OV- vibratore singolo; D-rivelatore con raddoppio di tensione; LPF-filtro passa basso.
Il funzionamento del rivelatore è spiegato con l'ausilio di diagrammi di temporizzazione.

Dopo aver attraversato i circuiti a banda stretta del canale di comunicazione, il segnale PFM diventa simile al segnale FM analogico. Dal blocco AO, è profondamente limitato in ampiezza su entrambi i lati in modo che gli stessi impulsi rettangolari di diverse velocità di ripetizione e durate si verifichino alla sua uscita. Nel blocco DC, questi impulsi sono differenziati nel tempo, per cui, alla sua uscita, UDC (t) rappresenta fronti e tagli. Questi ultimi sono impulsi bipolari molto stretti, che vengono convertiti nel blocco DW in unipolare Umot(t), raddoppiando così la frequenza di ripetizione. Nel blocco OB si formano impulsi rettangolari identici della stessa durata, ma con diverse velocità di ripetizione, che vengono inviati all'ingresso del blocco D. Schema del blocco D:

All'uscita del circuito è trasmesso un segnale analogico Ud(t). In alcuni casi il blocco OB è escluso. L'elevata stabilità dei parametri di questo rivelatore ha portato alla sua ampia applicazione anche per segnali FM analogici.
Modulazione dell'ampiezza dell'impulso. Descrizione. Applicazione. (10+)
Modulazione dell'ampiezza dell'impulso
Uno degli approcci per ridurre le perdite di riscaldamento degli elementi di potenza dei circuiti è l'uso di modalità operative di commutazione. In tali modalità, l'elemento di potenza è aperto, quindi c'è praticamente zero caduta di tensione su di esso, o chiuso, quindi non scorre corrente attraverso di esso. La potenza dissipata è uguale al prodotto di corrente e tensione. Maggiori informazioni su questo al link. In questa modalità è possibile raggiungere un'efficienza superiore all'80%.
Per ottenere in uscita un segnale della forma desiderata, l'interruttore di alimentazione si apre per un certo tempo proporzionale alla tensione di uscita desiderata. Questa è la modulazione della larghezza di impulso (PWM, PWM). Inoltre, un tale segnale, costituito da impulsi di diversa ampiezza, entra in un filtro costituito da un'induttanza e un condensatore. All'uscita del filtro si ottiene un segnale quasi ideale della forma desiderata.
Applicazione della modulazione dell'ampiezza di impulso (PWM)
Sfortunatamente, gli errori si verificano periodicamente negli articoli, vengono corretti, gli articoli vengono integrati, sviluppati, ne vengono preparati di nuovi. Iscriviti alla news per rimanere informato.
Se qualcosa non è chiaro, assicurati di chiedere!
Fai una domanda. Discussione dell'articolo. messaggi.
Altri articoli
Potenza potente trasformatore di impulsi. Calcolo. Calcolare. In linea. Oh...
Calcolo online di un trasformatore di impulsi di potenza....
Come non confondere più e meno? Protezione da inversione di polarità. Schema...
Circuito di protezione dall'inversione di polarità (inversione di polarità) dei caricatori...
Inverter risonante, convertitore boost di tensione. Il principio di r...
Montaggio e regolazione del convertitore di tensione step-up. Descrizione del principio di funzionamento...
Circuito oscillatorio. Schema. Calcolo. Applicazione. Risonanza. Risonante...
Calcolo e applicazione di circuiti oscillatori. Fenomeno di risonanza. Sequenziale...
Un semplice convertitore di tensione a impulsi diretti. 5 - 12 c...
Schema di un semplice convertitore di tensione per alimentare un amplificatore operazionale....
Correttore di fattore di potenza. Schema. Calcolo. Principio operativo....
Circuito rifasato...
Bespereboynik fai-da-te. UPS, UPS fai da te. Seno, sinusoide...
Come fare da soli un interruttore di continuità? Tensione di uscita puramente sinusoidale, con...
Potenza potente trasformatore di impulsi, induttanza. Avvolgimento. Fare...
Tecniche per l'avvolgimento di un'induttanza a impulsi / trasformatore ....
Perché le luci si spengono così lentamente nei cinema?
- Perché il proiezionista stacca la spina molto lentamente.
Introduzione alla modulazione di larghezza di impulso.
In precedenza, abbiamo imparato a controllare il LED modificando lo stato della porta GPIO. Abbiamo imparato a controllare la durata e la frequenza degli impulsi, grazie ai quali abbiamo ottenuto vari effetti di luce. Ci siamo assicurati che se modifichi lo stato della porta con una frequenza audio, puoi ottenere risultati diversi
suoni, modulazione di frequenza masterizzata ...
E cosa succede se cambiamo il livello della porta con una frequenza audio, ma invece di un altoparlante colleghiamo il nostro vecchio amico sperimentale: un LED?
Fai un esperimento. Modifica il nostro programma blink.c in modo che il LED si accenda e si spenga 200 volte al secondo, ad una frequenza di 200 Hz. Per fare ciò, basta modificare i parametri della funzione delay(). Per sapere quali ritardi inserire è sufficiente calcolare il periodo di oscillazione T. T=1/f. E da allora f è uguale a 200Hz, quindi T \u003d 1/200 \u003d 0,005 secondi o 5 millisecondi. Per questi 5 millisecondi, dobbiamo avere il tempo di accendere il LED e spegnerlo 1 volta. Poiché 5 per 2 non è divisibile, prendiamo il tempo di incandescenza del LED di 2 ms e il tempo di non incandescenza di 3 ms. 2+3=5, cioè l'intero periodo di un'oscillazione rimarrà di 5 ms. Ora cambiamo il programma: sostituisci delay(500) con delay(2) e delay(3) per on e off
LED rispettivamente.
Compiliamo il programma ed eseguiamolo. Se hai ancora un altoparlante installato nel circuito, sentirai un suono basso e se sostituisci l'altoparlante con un LED, vedrai un LED acceso continuamente. In effetti, il LED lampeggia, ovviamente, ma lo fa così velocemente che l'occhio non si accorge più di questo lampeggiamento e percepisce
è come un bagliore continuo. Ma il diodo non sembra brillare così brillantemente come bruciava con noi. Per fare un confronto, puoi eseguire il nostro primo programma, in cui il LED era costantemente acceso, e confrontare la luminosità del LED in entrambi i casi. Vediamo perché questo accade e come può essere utilizzato.
Ricordi, nella prima parte, abbiamo calcolato la resistenza di limitazione della corrente per alimentare il LED? Sappiamo che il LED ha una corrente di lavoro alla quale si illumina più intensamente. Se questa corrente viene ridotta, diminuisce anche la luminosità del LED. E quando iniziamo ad accendere e spegnere velocemente il LED, allora
la sua luminosità diventa dipendente dalla corrente media (Iср) per il periodo di oscillazione. Per un segnale a impulsi (a forma di P) che generiamo all'uscita della porta GPIO, la corrente media sarà proporzionale al rapporto tra t1 e t2. Vale a dire: Iср=In x t1/t2, dove In è la corrente nominale del LED, che impostiamo a 10mA grazie alla resistenza. Alla corrente nominale, il LED si illumina in modo più luminoso. E nel nostro caso, Iср = 10 x 2/3 = 6,7 mA. Vediamo che la corrente è diminuita, quindi il LED ha iniziato a bruciare meno intensamente. In questa formula viene chiamato il rapporto t1/t2 ciclo di lavoro D.
Maggiore è questo coefficiente, maggiore è il valore medio della corrente. Possiamo modificare questo rapporto da 0 a 1 o da 0% a 100%. Quindi, possiamo modificare la corrente media entro questi limiti. Si scopre che in questo modo possiamo regolare la luminosità del LED dal massimo allo spegnimento completo! E sebbene la tensione all'uscita della nostra porta possa ancora essere solo +3,3 V o 0 V, la corrente nel nostro circuito può cambiare. E cambiando questa corrente, possiamo facilmente controllare la nostra Malinka. Questo tipo di controllo è chiamato Modulazione dell'ampiezza di impulso, o semplicemente PWM. In inglese sembra PWM, o p modulazione di larghezza di impulso. PWM è un segnale a impulsi a frequenza costante con duty cycle variabile. Viene anche utilizzata una definizione come un segnale a impulsi di frequenza costante con un duty cycle variabile. Il duty cycle S è il reciproco del duty cycle e caratterizza il rapporto tra il periodo di impulso T e la sua durata t1.
S=T/t1=1/D.
Bene, per noi, per consolidare le nostre conoscenze, resta da scrivere un programma che accenderà e spegnerà senza problemi il nostro LED. Viene chiamato il processo di modifica della luminosità del bagliore oscuramento.
L'ho preso così:
dimmer.c
// Il programma cambia in modo graduale la luminosità del LED
// LED collegato alla porta P1_03#include
int principale()
{
se (!bcm2835_init()) restituisce 1;
Bcm2835_gpio_fsel(PIN,BCM2835_GPIO_FSEL_OUTP);
//Imposta la porta P1_03 per emettere unsigned int t_on, t_off;
// t_on durata dello stato acceso = t1 e t_off- dello stato spento = t2
Int d = 100, i, j, flag=0; // d- duty cycle in percentuale, i e j, variabili ausiliarie per l'organizzazione dei cicli, flag- se =0 il LED si spegne, se =1 si accende
Int a=10; // numero di cicli di lavoro completi
mentre (a)
{
for (j=100; j!=0; j--) //modifica il fattore di riempimento da 100% a 0%
{
t_on=50*g; // trova t1
t_off=50*(100-g); // trova t2
se (flag==0) d=d-1; // se il LED si sta spegnendo, ridurre il duty cycle
se (flag==1) d=d+1; // se il LED si accende, aumentare il duty cycle
Per (i=10; i!=0; i--) //trasferisce 10 impulsi al LED con i parametri calcolati t1 e t2
{
bcm2835_gpio_write(PIN, BASSO);
ritardoMicrosecondi(t_on);
bcm2835_gpio_write(PIN, ALTO);
ritardoMicrosecondi(t_off);
}
Se (d==0) flag=1; // se il LED è spento, inizia ad accenderlo
se (d==100) flag=0; // se il LED ha raggiunto la massima luminosità, iniziamo a spegnerlo
}
UN--;
}
return(!bcm2835_close()); // Esci dal programma
}
Salviamo il programma con il nome dimmer.c, lo compiliamo ed eseguiamo.
Come puoi vedere, ora il nostro LED si sta spegnendo lentamente e si accende lentamente. Ecco come funziona PWM. La modulazione dell'ampiezza dell'impulso viene utilizzata in molte aree. Ciò include il controllo della luminosità delle lampade e dei LED, il controllo dei servocomandi, la regolazione della tensione negli alimentatori a commutazione (che, ad esempio, si trovano nel computer), nei convertitori da digitale ad analogico e da analogico a digitale, ecc. A proposito, se torniamo al nostro circuito di altoparlanti, con l'aiuto di PWM puoi controllare il volume del segnale e, cambiando la frequenza, il suo tono.
Ricordi il vecchio aneddoto della prefazione a questa parte, sul proiezionista che estrae lentamente la spina dalla presa? Ora sappiamo che questo proiezionista, per poter spegnere senza problemi la luce, deve, invece, inserire ed estrarre molto velocemente la spina dalla presa.
Qui è dove finiremo questa lezione. Resta solo da aggiungere che PWM viene utilizzato così spesso in varie applicazioni che i produttori di apparecchiature per processori spesso costruiscono un controller PWM direttamente nel processore. Quelli. imposti i parametri del segnale di cui hai bisogno al processore e il processore stesso, senza il tuo aiuto, emette il segnale di cui hai bisogno. Allo stesso tempo, senza spendere risorse software per la generazione di questo segnale. Bcm2835 ha anche PWM hardware integrato. E questo PWM è una funzionalità alternativa della porta GPIO 18 o P1-12. Per utilizzare l'hardware PWM, dobbiamo impostare la porta P1-12 in modalità ALT5 e impostare i parametri del processore. Ma questa è una storia completamente diversa...