Obwód rezonansowy zamiast PWM. Modulacja szerokości impulsu, PWM, PWM, sterowanie, regulacja, regulator, modulator
Przeczytaj także
8. Modulacja szerokości impulsu w przetwornikach
8.1. Informacje ogólne
Zasady sterowania i modulacji impulsów omówiono w rozdz. 4 na przykładzie najprostszego obwodu regulatora DC. Jednocześnie podano definicje głównych rodzajów modulacji impulsów stosowanych w teorii liniowych układów impulsowych, które odpowiadają praktyce sterowania impulsowymi przekształtnikami DC.
Jednak modulacja szerokości impulsów napięć lub prądów w przekształtnikach prądu przemiennego ma nieco inną definicję w energoelektronice, biorąc pod uwagę cechy PWM przy rozwiązywaniu problemów konwersji energii elektrycznej na prąd przemienny. Zgodnie z definicją w normie IEC 551-16-30, modulacja szerokości impulsu odnosi się do sterowania impulsami, w którym szerokość lub częstotliwość impulsów lub obie są modulowane w okresie częstotliwości podstawowej w celu uzyskania określonego kształtu przebiegu napięcia wyjściowego . W większości przypadków PWM jest realizowany w celu zapewnienia sinusoidalnego napięcia lub prądu, czyli zmniejszenia poziomu wyższych harmonicznych w stosunku do podstawowej (pierwszej) harmonicznej i jest nazywany sinusoidalnym. Istnieją następujące główne metody zapewnienia sinusoidalności: analogowy PWM i jego modyfikacje; selektywne (selektywne) tłumienie wyższych harmonicznych; histereza lub modulacja delta;
modulacja wektora przestrzennego.
Klasycznym wariantem zorganizowania analogowego sinusoidalnego PWM jest zmiana szerokości impulsów tworzących napięcie wyjściowe (prąd) poprzez porównanie sygnału napięciowego o określonym kształcie, zwanego odniesieniem lub odniesieniem, z trójkątnym sygnałem napięciowym, który ma wyższą częstotliwości i jest nazywany sygnałem nośnym. Sygnał odniesienia jest modulowany i określa wymagany kształt napięcia wyjściowego (prądu). Istnieje wiele modyfikacji tej metody, w których sygnały modulujące są reprezentowane przez specjalne funkcje inne niż sinusoida. Notatki z wykładu będą obejmować kilka podstawowych obwodów wyjaśniających te metody PWM.
Metoda selektywnego tłumienia wyższych harmonicznych jest obecnie z powodzeniem realizowana za pomocą sterowników mikroprocesorowych opartych na oprogramowaniu. Modulacja histerezy opiera się na zasadzie działania przekaźnika „za” sygnałem odniesienia, np. przebiegiem sinusoidalnym. W najprostszej realizacji technicznej metoda ta łączy zasady PWM i PFM (modulacja częstotliwości impulsów). Jednak za pomocą specjalnych środków obwodów można ustabilizować częstotliwość modulacji lub ograniczyć zakres jej zmiany.
Metoda modulacji wektora przestrzennego polega na zamianie trójfazowego układu napięciowego na dwufazowy i uzyskaniu uogólnionego wektora przestrzennego. Wartość tego wektora jest obliczana w czasach określonych przez częstotliwość podstawową i modulującą. Jest uważany za bardzo obiecujący w przypadku sterowania falownikami trójfazowymi, w szczególności w przypadku zastosowania w napędzie elektrycznym. Jednocześnie jest pod wieloma względami podobny do tradycyjnego sinusoidalnego PWM.
Układy sterowania oparte na PWM pozwalają nie tylko na uzyskanie sinusoidalnego kształtu uśrednionych wartości podstawowej harmonicznej napięcia lub prądu, ale także na sterowanie wartościami jej amplitudy, częstotliwości i fazy. Ponieważ w tych przypadkach przekształtnik wykorzystuje w pełni sterowane przełączniki, możliwa staje się realizacja pracy przekształtników AC (DC) wraz z siecią AC we wszystkich czterech kwadrantach zarówno w trybie prostowniczym, jak i odwracającym przy dowolnej wartości podstawowego współczynnika mocy cosφ w zakres od -1 do 1. Ponadto wraz ze wzrostem częstotliwości nośnej rozszerzają się możliwości odtwarzania na wyjściu falowników prądu i napięcia o danej postaci. Pozwala to na tworzenie aktywnych filtrów do tłumienia wyższych harmonicznych.
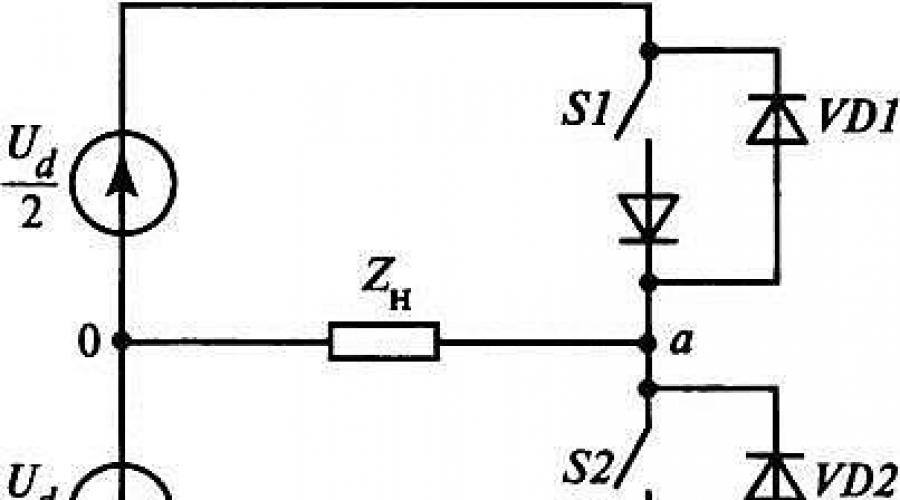
Główne definicje użyte w dalszej prezentacji rozważymy na przykładzie zastosowania pierwszej metody w jednofazowym obwodzie półmostkowym falownika napięcia (rys. 8.1, a). W tym schemacie warunkowym klawisze S1 oraz S2 są reprezentowane przez w pełni sterowane elementy przełączające, uzupełnione diodami połączonymi szeregowo i równolegle z nimi. Diody szeregowe odzwierciedlają jednokierunkowe przewodzenie kluczy (na przykład tranzystorów lub tyrystorów), podczas gdy diody równoległe zapewniają przewodzenie prądów wstecznych przy obciążeniu czynno-indukcyjnym.
Schematy odniesienia, modulacja ty M (θ) i przewoźnik ty Sygnały H (θ) pokazano na ryc. 8.1, b. Generowanie impulsów sterujących kluczem S 1 i S 2 odbywa się zgodnie z następującą zasadą. Na ty M (θ) > ty Klawisz H(θ) S 1 jest włączony, a S 2 wyłączony. Na ty M(θ)< ty H (θ) stany klawiszy są odwrócone: S 2 - włączone, a S 1 - wyłączony. W ten sposób na wyjściu falownika powstaje napięcie w postaci dwóch impulsów biegunowych. W rzeczywistych obwodach, aby wykluczyć jednoczesne przewodzenie kluczy S 1 i S 2, należy zapewnić pewne opóźnienie między momentami generowania sygnałów do włączenia tych kluczyków. Oczywiście szerokość impulsu zależy od stosunku amplitud sygnału ty M (θ) i ty H(θ). Parametr charakteryzujący ten stosunek nazywany jest wskaźnikiem modulacji amplitudy i jest określony wzorem (8.1):
, (8.1.)
gdzie U M m i U H m - maksymalne wartości sygnału modulującego ty M (θ) i sygnał nośny ty H(θ), odpowiednio.


Ryż. 8.1. Jednofazowy półmostkowy falownik napięcia: a- schemat; b– wykresy napięć dla modulacji impulsów
Częstotliwość nośna ty H (θ) jest równe częstotliwości przełączania f Klawisze H S 1 i S 2 i zwykle znacznie przekracza częstotliwość sygnału modulującego f M. Stosunek częstotliwości f Ręka f M jest ważnym wskaźnikiem efektywności procesu modulacji i nazywa się go wskaźnikiem modulacji częstotliwości, który określa wzór (8.2):
Dla małych wartości M f sygnały ty M (θ) i ty H (θ) musi być zsynchronizowane, aby uniknąć niepożądanych subharmonicznych. B jako wartość maksymalna Mój, który decyduje o potrzebie synchronizacji, jest ustawiony M f = 21. Oczywiście przy zsynchronizowanych sygnałach i współczynniku M f jest stałą.
Ze schematu na ryc. 8.1 widać, że amplituda pierwszej harmonicznej napięcia wyjściowego U 1, z uwzględnieniem (8.1), można przedstawić w następującej formie (8.3):
![]() (8.3)
(8.3)
Zgodnie z (8.3) dla M a = 1 amplituda pierwszej harmonicznej napięcia wyjściowego jest równa wysokości prostokąta półfalowego U d/2. Charakterystyczną zależność względnej wartości pierwszej harmonicznej napięcia wyjściowego od wartości Ma pokazano na rys. 8.2, co pokazuje, że zmiana M a od 0 do 1 jest liniowe i zależy od amplitudy U jestem 1 . Wartość graniczna M a określa zasada rozpatrywanego rodzaju modulacji, zgodnie z którą wartość maksymalna U am 1 jest ograniczona przez wysokość prostokątnej półfali równej U d/2. Przy dalszym wzroście współczynnika M modulacja prowadzi do nieliniowego wzrostu amplitudy U am 1 do maksymalnej wartości określonej przez powstawanie prostokątnego napięcia na wyjściu falownika, które następnie pozostaje niezmienione.
Rozwinięcie funkcji prostokątnej w szereg Fouriera daje wartość maksymalną (8.4):
![]() (8.4)
(8.4)
Ta wartość jest ograniczona wartością indeksu M a, wahające się w zakresie od 0 do około 3. Jest oczywiste, że funkcja na przedziale a-b o wartościach od 1 do 3,2 jest nieliniowa (rys. 8.2). Tryb działania w tej sekcji nazywa się nadmodulacją.
Oznaczający M f określony przez wybór częstotliwości sygnału nośnego ty H (θ) i znacząco wpływa na parametry techniczne konwertera. Wraz ze wzrostem częstotliwości rosną straty przełączania w wyłącznikach mocy przekształtników, ale jednocześnie poprawia się skład spektralny napięcia wyjściowego i uproszczone jest rozwiązanie problemu filtrowania wyższych harmonicznych w wyniku procesu modulacji. Ważny czynnik przy wyborze wartości f H w wielu przypadkach to konieczność zapewnienia jego wartości w zakresie częstotliwości audio powyżej 20 kHz. Przy wyborze f H powinien również uwzględniać poziom napięć roboczych przekształtnika, jego moc i inne parametry.

Ryż. 8.2. Zależność względnej wartości amplitudy podstawowej harmonicznej napięcia wyjściowego od wskaźnika modulacji amplitudy dla jednofazowego obwodu półmostkowego
Ogólnym trendem jest tutaj wzrost wartości M f konwertery małej mocy i niskiego napięcia i odwrotnie. Wybór poety M f jest problemem optymalizacji wielokryterialnej.
Modulacja impulsów z procesem stochastycznym. Zastosowanie PWM w przekształtnikach wiąże się z pojawieniem się wyższych harmonicznych w modulowanych napięciach i prądach. Ponadto w składzie widmowym tych parametrów najbardziej znaczące harmoniczne występują przy częstotliwościach będących wielokrotnościami wskaźnika modulacji częstotliwości M f i harmoniczne zgrupowane wokół nich na częstotliwościach bocznych o malejących amplitudach. Wyższe harmoniczne mogą powodować następujące główne problemy:
występowanie hałasu akustycznego;
pogorszenie kompatybilności elektromagnetycznej (EMC) z innymi urządzeniami lub systemami elektrycznymi.
Głównymi źródłami hałasu akustycznego są elementy elektromagnetyczne (dławiki i transformatory), na które oddziałuje prąd i napięcie zawierające wyższe harmoniczne o częstotliwościach z zakresu audio. Należy zauważyć, że hałas może występować na pewnych częstotliwościach, gdzie wyższe harmoniczne są na maksimum. Czynniki powodujące zakłócenia, takie jak zjawisko magnetostrykcji, komplikują rozwiązanie problemu EMC. Problemy EMC mogą wystąpić w szerokim zakresie częstotliwości, w zależności od stopnia zakłóceń elektromagnetycznych urządzeń elektrycznych. Tradycyjnie zastosowano rozwiązania konstrukcyjne i technologiczne w celu zmniejszenia poziomu hałasu oraz zastosowano filtry pasywne w celu zapewnienia EMC.
Metody związane ze zmianą charakteru składu widmowego modulowanych napięć i prądów są uważane za obiecujący kierunek rozwiązania tych problemów. Istotą tych metod jest wyrównanie widma częstotliwościowego i zmniejszenie amplitudy wyraźnych harmonicznych ze względu na ich stochastyczny rozkład w szerokim zakresie częstotliwości. Ta technika jest czasami nazywana „rozmazywaniem” widma częstotliwości. Koncentracja energii zakłóceń spada przy częstotliwościach, w których harmoniczne mogą być najwyższe. Implementacja tych metod nie wiąże się z oddziaływaniem na elementy części mocy przekształtników iw większości przypadków jest ograniczana przez narzędzia programowe z niewielką zmianą w układzie sterowania.
Rozważmy pokrótce zasady wdrażania tych metod. PWM opiera się na zmianie współczynnika wypełnienia γ= t oraz / T n, gdzie t u - czas trwania impulsu; T n- okres jej powstawania. Zwykle te wartości, a także położenie impulsu w przedziale okresu T n są stałe w stanie ustalonym. Wyniki PWM są definiowane jako wartości uśrednione całkowe. W tym przypadku deterministyczne wartości ti włącznie z położeniem impulsu powodują niekorzystny skład widmowy modulowanych parametrów. Jeżeli wielkościom tym nadamy losowy charakter przy zachowaniu zadanej wartości γ, to procesy stają się stochastyczne i zmienia się skład spektralny modulowanych parametrów. Na przykład taki losowy znak można nadać pozycji impulsu t i na przedziale okresu Tn lub zapewnić stochastyczną zmianę tego ostatniego. W tym celu można wykorzystać generator liczb losowych, który działa na główny generator częstotliwości modulacji f n =1/T n. Podobnie możesz zmienić położenie impulsu na interwale T n z matematycznym oczekiwaniem równym zero. Przeciętna wartość całki γ musi pozostać na poziomie zadanym przez układ regulacji, w wyniku czego nastąpi wyrównanie składu spektralnego wyższych harmonicznych w modulowanych napięciach i prądach.
Pytania do samokontroli
1. Wymień główne metody PWM zapewniające prąd lub napięcie sinusoidalne.
2. Jaka jest różnica między unipolarną modulacją napięcia a bipolarną?
3. Wymień główne parametry PWM.
4. Jaki jest cel wykorzystania PWM w procesach stochastycznych?
Modulacja szerokości impulsu (PWM) to metoda konwersji sygnału, w której zmienia się czas trwania impulsu (cykl pracy), a częstotliwość pozostaje stała. W terminologii angielskiej określa się to mianem PWM (modulacja szerokości impulsu). W tym artykule szczegółowo zrozumiemy, czym jest PWM, gdzie jest używany i jak działa.
Obszar zastosowań
Wraz z rozwojem technologii mikrokontrolerów otworzyły się przed PWM nowe możliwości. Zasada ta stała się podstawą urządzeń elektronicznych, które wymagają zarówno dostosowania parametrów wyjściowych, jak i utrzymania ich na zadanym poziomie. Metoda modulacji szerokości impulsu służy do zmiany jasności światła, prędkości obrotowej silników, a także do sterowania tranzystorem mocy zasilaczy impulsowych (PSU).
Modulacja szerokości impulsu (PW) jest aktywnie wykorzystywana w budowie systemów sterowania jasnością diod LED. Ze względu na małą bezwładność dioda LED ma czas na przełączenie (błysk i zgaśnięcie) z częstotliwością kilkudziesięciu kHz. Jego działanie w trybie pulsacyjnym jest odbierane przez ludzkie oko jako ciągły blask. Z kolei jasność zależy od czasu trwania impulsu (stanu otwartego diody LED) w jednym okresie. Jeżeli czas impulsu jest równy czasowi przerwy, czyli współczynnik wypełnienia wynosi 50%, to jasność diody LED będzie równa połowie wartości nominalnej. Wraz z popularyzacją lamp LED 220 V pojawiło się pytanie o zwiększenie niezawodności ich działania przy niestabilnym napięciu wejściowym. Rozwiązanie znaleziono w postaci uniwersalnego mikroukładu - sterownika mocy działającego na zasadzie modulacji szerokości impulsu lub częstotliwości impulsu. Szczegółowo opisano układ oparty na jednym z tych sterowników.
Napięcie sieciowe dostarczane na wejście mikroukładu sterownika jest stale porównywane z napięciem odniesienia w obwodzie, tworząc na wyjściu sygnał PWM (PFM), którego parametry są ustawiane przez zewnętrzne rezystory. Niektóre mikroukłady mają wyjście do dostarczania analogowego lub cyfrowego sygnału sterującego. Dzięki temu pracą sterownika impulsowego można sterować za pomocą innego konwertera SHI. Co ciekawe, dioda LED nie odbiera impulsów o wysokiej częstotliwości, ale prąd wygładzany przez dławik, który jest nieodzownym elementem takich obwodów.
Masowe wykorzystanie PWM znajduje odzwierciedlenie we wszystkich panelach LCD z podświetleniem LED. Niestety w monitorach LED większość przetworników SHI działa z częstotliwością setek herców, co negatywnie wpływa na widzenie użytkowników komputerów PC.
Mikrokontroler Arduino może również pracować w trybie kontrolera PWM. Aby to zrobić, wywołaj funkcję AnalogWrite () ze wskazanymi w nawiasach wartościami od 0 do 255. Zero odpowiada 0 V, a 255 do 5 V. Wartości pośrednie obliczane są proporcjonalnie.
Wszechobecność urządzeń działających na zasadzie PWM pozwoliła ludzkości odejść od transformatorowych zasilaczy liniowych. W efekcie kilkukrotny wzrost wydajności oraz zmniejszenie masy i wielkości źródeł zasilania.
Sterownik PWM jest integralną częścią nowoczesnego zasilacza impulsowego. Steruje pracą tranzystora mocy znajdującego się w obwodzie pierwotnym transformatora impulsowego. Dzięki obecności układu sprzężenia zwrotnego napięcie na wyjściu zasilacza zawsze pozostaje stabilne. Najmniejsze odchylenie napięcia wyjściowego poprzez sprzężenie zwrotne jest ustalane przez mikroukład, który natychmiast koryguje cykl pracy impulsów sterujących. Ponadto nowoczesny sterownik PWM rozwiązuje szereg dodatkowych zadań poprawiających niezawodność zasilania:
- zapewnia tryb miękkiego startu konwertera;
- ogranicza amplitudę i współczynnik wypełnienia impulsów sterujących;
- kontroluje poziom napięcia wejściowego;
- zabezpiecza przed zwarciem i przegrzaniem wyłącznika;
- w razie potrzeby przełącza urządzenie w tryb czuwania.
Zasada działania kontrolera PWM
Zadaniem sterownika PWM jest sterowanie wyłącznikiem zasilania poprzez zmianę impulsów sterujących. Podczas pracy w trybie klucza tranzystor znajduje się w jednym z dwóch stanów (całkowicie otwarty, całkowicie zamknięty). W stanie zamkniętym prąd płynący przez złącze p-n nie przekracza kilku μA, co oznacza, że moc rozpraszania dąży do zera. W stanie otwartym pomimo dużego prądu rezystancja złącza p-n jest zbyt niska, co również prowadzi do nieznacznych strat ciepła. Największa ilość ciepła jest uwalniana w momencie przejścia z jednego stanu do drugiego. Jednak ze względu na krótki czas procesu przejścia w porównaniu z częstotliwością modulacji, straty mocy podczas przełączania są znikome.
Modulacja szerokości impulsu dzieli się na dwa typy: analogową i cyfrową. Każdy z typów ma swoje zalety i może być zaimplementowany w obwodach na różne sposoby.
analogowy PWM
Zasada działania analogowego modulatora SHI opiera się na porównaniu dwóch sygnałów, których częstotliwość różni się o kilka rzędów wielkości. Elementem porównawczym jest wzmacniacz operacyjny (komparator). Do jednego z wejść przykładane jest napięcie piłokształtne o wysokiej stałej częstotliwości, a na drugie napięcie modulujące o niskiej częstotliwości o zmiennej amplitudzie. Komparator porównuje obie wartości i generuje na wyjściu impulsy prostokątne, których czas trwania określa aktualna wartość sygnału modulującego. W tym przypadku częstotliwość PWM jest równa częstotliwości sygnału piłokształtnego.
Cyfrowy PWM
Modulacja szerokości impulsu w interpretacji cyfrowej jest jedną z wielu funkcji mikrokontrolera (MC). Działając wyłącznie z danymi cyfrowymi, MK może generować wysoki (100%) lub niski (0%) poziom napięcia na swoich wyjściach. Jednak w większości przypadków, aby skutecznie kontrolować obciążenie, należy zmienić napięcie na wyjściu MK. Na przykład regulacja prędkości obrotowej silnika, zmiana jasności diody LED. Co zrobić, aby na wyjściu mikrokontrolera uzyskać dowolną wartość napięcia z zakresu od 0 do 100%?
Zagadnienie rozwiązuje zastosowanie metody modulacji szerokości impulsów oraz wykorzystanie zjawiska oversamplingu, gdy określona częstotliwość przełączania jest kilkakrotnie wyższa od odpowiedzi sterowanego urządzenia. Zmieniając cykl pracy impulsów, zmienia się średnia wartość napięcia wyjściowego. Z reguły cały proces odbywa się z częstotliwością od kilkudziesięciu do kilkuset kHz, co pozwala na osiągnięcie płynnej regulacji. Technicznie jest to realizowane za pomocą kontrolera PWM - specjalistycznego mikroukładu, który jest „sercem” każdego cyfrowego systemu sterowania. Aktywne wykorzystanie kontrolerów opartych na PWM wynika z ich niezaprzeczalnych zalet:
- wysoka wydajność konwersji sygnału;
- stabilność pracy;
- oszczędność energii zużywanej przez ładunek;
- niska cena;
- wysoka niezawodność całego urządzenia.
Istnieją dwa sposoby uzyskania sygnału PWM na pinach mikrokontrolera: sprzęt i oprogramowanie. Każdy MK ma wbudowany zegar, który jest w stanie generować impulsy PWM na określonych pinach. W ten sposób osiąga się implementację sprzętową. Uzyskanie sygnału PWM za pomocą poleceń programowych ma więcej opcji pod względem rozdzielczości i pozwala na użycie większej liczby pinów. Jednak metoda oprogramowania prowadzi do dużego obciążenia MK i zajmuje dużo pamięci.
Warto zauważyć, że w cyfrowym PWM liczba impulsów na okres może być różna, a same impulsy mogą znajdować się w dowolnej części okresu. Poziom sygnału wyjściowego jest określony przez całkowity czas trwania wszystkich impulsów na okres. Należy rozumieć, że każdy dodatkowy impuls jest przejściem tranzystora mocy ze stanu otwartego do stanu zamkniętego, co prowadzi do wzrostu strat podczas przełączania.
Przykład wykorzystania kontrolera PWM
Jedna z opcji implementacji prostego kontrolera PWM została już opisana wcześniej w. Jest zbudowany na bazie mikroukładu i ma małe wiązanie. Ale pomimo prostoty obwodu regulator ma dość szeroki zakres zastosowań: obwody sterujące jasnością diod LED, paski LED, regulację prędkości obrotowej silników prądu stałego.
Przeczytaj także
W przypadku PWM znak analogowego sygnału modelującego b(t) (rysunek A) zmienia szerokość (czas trwania impulsu (c)) podnośnej ze stałą amplitudą i częstotliwością powtarzania.
PWM jest czasami nazywany DIM z modulacją długiego impulsu.
Rozróżnij JEDNOSTRONNY i DWUSTRONNY PWM.
Przy jednostronnym PWM zmiana szerokości impulsu następuje tylko ze względu na przesunięcie odcięcia impulsu (PWM-1) (rysunek B)
Oraz z dwustronnym cięciem i przodem impulsowym PWM-2 (rysunek D)
Najczęściej używany PWM-1

I założymy, że sygnał modelujący
zmiany zgodnie z prawem harmonicznym, zgodnie z którym
szerokość impulsu to:
Gdzie  - odchyłka czasu trwania impulsu
- odchyłka czasu trwania impulsu
Podstawiając tę wartość  do poprzedniego
do poprzedniego
wyrażenie otrzymujemy widmowy sygnał sygnału PWM.
Najwygodniej jest wykonać modulator sygnału PWM na układach scalonych (IC)

Wejście 2 jest zasilane impulsową podnośną
Wejście 5 – analogowy sygnał modelujący b(t)
demodulator PWM to najczęściej LPF
27. Modulacja fazowo-impulsowa. Modulatory sygnału PIM.
W PIM, zgodnie z prawem symulowanego sygnału analogowego b(t), zmienia się tylko pozycja czasowa impulsów wideo podnośnej, podczas gdy ich amplituda i czas trwania pozostają niezmienione.
Jeśli zróżnicujesz sygnał PWM w czasie, otrzymuje się impulsy dodatnie i ujemne.
Impuls dodatni odpowiada przodowi sygnału PWM, a impuls ujemny odpowiada jego odcięciu.
Przy jednokierunkowym PWM impulsy dodatnie są nieruchome, a ujemne są przesuwane proporcjonalnie do sygnału modelującego b(t) wzdłuż osi czasu.
Impulsy stacjonarne można wyeliminować rezystancyjnym prostownikiem półfalowym, a pozostałe impulsy są sygnałami PPM.
Modulator sygnału PWM składa się w tym przypadku z modulatora PWM, do którego wyjścia podłączone jest urządzenie różniczkujące DU i prostownik półfalowy OB. (widzieć zdjęcie)

Wyrażenie analityczne sygnału PIM ma postać:

 - amplituda impulsu
- amplituda impulsu
 -funkcja opisująca obwiednię impulsu pomiarowego.
-funkcja opisująca obwiednię impulsu pomiarowego.
 - przesunięcie pozycji czasowej impulsu pomiarowego
- przesunięcie pozycji czasowej impulsu pomiarowego
 - wartość przesłanej wiadomości w danym momencie
- wartość przesłanej wiadomości w danym momencie 
Widmo częstotliwości sygnałów PIM jest analitycznie trudne do przedstawienia
Przybliżona wartość amplitudy przesyłanego sygnału harmonicznego w widmie PIM wynosi:

Gdzie  - częstotliwość wiadomości
- częstotliwość wiadomości
 - czas trwania impulsu
- czas trwania impulsu
Amplituda przesyłanego sygnału w widmie PWM jest bardzo mała (znacznie mniejsza niż w widmach AIM i PWM i jest funkcją częstotliwości modelowania  , czyli zniekształcony).
, czyli zniekształcony).
Dlatego demodulacja sygnałów PPM z filtrem dolnoprzepustowym nie jest bezpośrednio możliwa.
Są konwertowane na sygnały AIM lub PWM.
28. Modulacja częstotliwościowo-impulsowa. Detektory sygnału dzwonkowego.
Detektor można wykonać według schematu
Gdzie F- filtr kanałów; UAB- ogranicznik amplitudy; DC-różnic. łańcuch; DV- prostownik dwupołówkowy z obciążeniem czynnym; OW- pojedynczy wibrator; D-detektor z podwojeniem napięcia; LPF-Filtr dolnoprzepustowy.
Działanie detektora wyjaśniono za pomocą wykresów czasowych.

Po przejściu przez wąskopasmowe obwody kanału komunikacyjnego sygnał PFM staje się podobny do analogowego sygnału FM. Blok AO ma głęboko ograniczoną amplitudę po obu stronach, tak że na jego wyjściu pojawiają się te same prostokątne impulsy o różnych częstotliwościach i czasie trwania. W bloku DC impulsy te są zróżnicowane w czasie, w wyniku czego na wyjściu UDC (t) reprezentuje fronty i cięcia. Te ostatnie są bardzo wąskimi impulsami bipolarnymi, które w bloku DW są przekształcane w jednobiegunowe Umot(t), podwajając tym samym szybkość powtarzania. W bloku OB powstają identyczne prostokątne impulsy o tym samym czasie trwania, ale o różnych częstotliwościach powtarzania, które są podawane na wejście bloku D. Schemat ideowy bloku D:

Na wyjściu układu przesyłany jest sygnał analogowy Ud(t). W niektórych przypadkach blok OB jest wykluczony. Wysoka stabilność parametrów tego detektora doprowadziła do jego szerokiego zastosowania nawet dla analogowych sygnałów FM.
Modulacja szerokości impulsów. Opis. Podanie. (10+)
Modulacja szerokości impulsów
Jednym z podejść do zmniejszenia strat cieplnych elementów mocy obwodów jest zastosowanie przełączania trybów pracy. W takich trybach element mocy jest albo otwarty, wtedy praktycznie jest na nim zerowy spadek napięcia, albo zamknięty, wtedy przepływa przez niego zerowy prąd. Moc rozpraszana jest równa iloczynowi prądu i napięcia. Więcej na ten temat pod linkiem. W tym trybie możliwe jest osiągnięcie wydajności ponad 80%.
Aby uzyskać na wyjściu sygnał o pożądanym kształcie, wyłącznik zasilania otwiera się na pewien czas proporcjonalny do pożądanego napięcia wyjściowego. Jest to modulacja szerokości impulsu (PWM, PWM). Ponadto taki sygnał, składający się z impulsów o różnych szerokościach, wchodzi do filtra składającego się z dławika i kondensatora. Na wyjściu filtra uzyskuje się prawie idealny sygnał o pożądanym kształcie.
Zastosowanie modulacji szerokości impulsu (PWM)
Niestety błędy pojawiają się okresowo w artykułach, są one poprawiane, artykuły są uzupełniane, rozwijane, przygotowywane są nowe. Zapisz się do wiadomości, aby być na bieżąco.
Jeśli coś jest niejasne, koniecznie zapytaj!
Zadać pytanie. Dyskusja artykułu. wiadomości.
Więcej artykułów
Moc potężny transformator impulsowy. Obliczenie. Oblicz. Online. O...
Obliczanie online transformatora impulsowego mocy....
Jak nie pomylić plusa i minusa? Ochrona przed odwrotną polaryzacją. Schemat...
Obwód zabezpieczający przed odwrotną polaryzacją (odwrócenie polaryzacji) ładowarek...
Falownik rezonansowy, konwerter podwyższający napięcie. Zasada r...
Montaż i regulacja przetwornicy napięcia podwyższającego. Opis zasady działania...
Obwód oscylacyjny. Schemat. Obliczenie. Podanie. Rezonans. Rezonansowy...
Obliczanie i zastosowanie obwodów oscylacyjnych. Zjawisko rezonansu. Sekwencyjny...
Prosty konwerter napięcia impulsowego do przodu. 5 - 12...
Schemat prostego przetwornika napięcia do zasilania wzmacniacza operacyjnego....
Korektor współczynnika mocy. Schemat. Obliczenie. Zasada działania....
Obwód korektora współczynnika mocy...
Bespereboynik zrób to sam. UPS, UPS zrób to sam. Sinusoidalny, sinusoidalny...
Jak samodzielnie dokonać bezprzerwowej zmiany? Czysto sinusoidalne napięcie wyjściowe, z...
Moc potężny transformator impulsowy, dławik. Meandrowy. Robić...
Techniki nawijania dławika impulsowego / transformatora ....
Dlaczego światła gasną tak wolno w kinach?
-Ponieważ operator bardzo powoli odłącza wtyczkę.
Wprowadzenie do modulacji szerokości impulsów.
Wcześniej dowiedzieliśmy się, jak sterować diodą LED poprzez zmianę stanu portu GPIO. Nauczyliśmy się kontrolować czas trwania i częstotliwość impulsów, dzięki czemu uzyskaliśmy różne efekty świetlne. Upewniliśmy się, że jeśli zmienisz stan portu z częstotliwością audio, możesz uzyskać inny
dźwięki, opanowana modulacja częstotliwości...
A co się stanie, jeśli zmienimy poziom portu z częstotliwością audio, ale zamiast głośnika podłączymy naszego starego eksperymentalnego przyjaciela - diodę LED?
Zrób eksperyment. Zmodyfikuj nasz program blink.c tak, aby dioda LED włączała się i wyłączała 200 razy na sekundę, z częstotliwością 200 Hz. Aby to zrobić, po prostu zmień parametry funkcji delay(). Aby dowiedzieć się, jakie opóźnienia wprowadzić, wystarczy obliczyć okres oscylacji T. T=1/f. A ponieważ f jest równe 200 Hz, a następnie T \u003d 1/200 \u003d 0,005 sekundy lub 5 milisekund. Przez te 5 milisekund musimy mieć czas na włączenie diody LED i wyłączenie jej 1 raz. Ponieważ 5 przez 2 nie jest podzielne, przyjmijmy czas świecenia diody 2 ms, a czas nieświecenia 3 ms. 2+3=5, czyli pełny okres jednej oscylacji pozostanie 5 ms. Teraz zmieńmy program: zamień delay(500) na delay(2) i delay(3) dla włączania i wyłączania
Diody LED odpowiednio.
Skompilujmy program i uruchommy go. Jeśli nadal masz zainstalowany głośnik w obwodzie, usłyszysz niski dźwięk, a jeśli wymienisz głośnik na diodę LED, zobaczysz diodę świecącą światłem ciągłym. Faktycznie dioda mruga oczywiście, ale robi to tak szybko, że oko już nie zauważa tego mrugania i dostrzega
to jak ciągły blask. Ale dioda nie wydaje się świecić tak jasno, jak kiedyś u nas świeciła. Dla porównania możesz uruchomić nasz pierwszy program, w którym dioda LED była stale włączona i porównać jasność diody LED w obu przypadkach. Zobaczmy, dlaczego tak się dzieje i jak można to wykorzystać.
Pamiętasz, że w pierwszej części obliczyliśmy rezystor ograniczający prąd do zasilania diody LED? Wiemy, że dioda LED ma prąd roboczy, przy którym świeci najjaśniej. Jeśli ten prąd zostanie zmniejszony, zmniejszy się również jasność diody LED. A kiedy zaczniemy szybko włączać i wyłączać diodę, to
jego jasność zależy od średniego prądu (Iср) dla okresu oscylacji. Dla sygnału impulsowego (w kształcie litery P), który generujemy na wyjściu portu GPIO, średni prąd będzie proporcjonalny do stosunku t1 do t2. Mianowicie: Iср=In x t1/t2, gdzie In jest prądem znamionowym diody, który ustawiamy na 10mA dzięki rezystorowi. Przy prądzie znamionowym dioda LED świeci najjaśniej. A w naszym przypadku Iср = 10 x 2/3 = 6,7 mA. Widzimy, że prąd stał się mniejszy, więc dioda LED zaczęła świecić mniej jasno. W tym wzorze stosunek t1/t2 nazywa się cykl pracy D.
Im większy ten współczynnik, tym większa średnia wartość prądu. Możemy zmienić ten stosunek z 0 na 1 lub z 0% na 100%. Możemy więc zmienić średni prąd w tych granicach. Okazuje się, że w ten sposób możemy regulować jasność diody od maksimum do całkowitego wyłączenia! I choć napięcie na wyjściu naszego portu może nadal wynosić tylko +3,3V lub 0V, to prąd w naszym obwodzie może się zmieniać. A zmieniając ten prąd w łatwy sposób możemy zapanować nad naszą Malinką. Ten rodzaj kontroli nazywa się Modulacja szerokości impulsów, lub po prostu PWM. Po angielsku to brzmi jak PWM lub P Modulacja szerokości impulsów. PWM to sygnał impulsowy o stałej częstotliwości ze zmiennym współczynnikiem wypełnienia. Stosowane jest również takie określenie, jak sygnał impulsowy o stałej częstotliwości ze zmiennym współczynnikiem wypełnienia. Współczynnik wypełnienia S jest odwrotnością współczynnika wypełnienia i charakteryzuje stosunek okresu impulsu T do czasu jego trwania t1.
S=T/t1=1/D.
Otóż nam, aby skonsolidować naszą wiedzę, pozostaje napisać program, który będzie płynnie włączał i wyłączał naszą diodę LED. Nazywa się proces zmiany jasności blasku ściemnianie.
Mam to tak:
ściemniacz.c
// Program płynnie zmienia jasność diody LED
// dioda LED podłączona do portu P1_03#include
int main()
{
jeśli (!bcm2835_init()) zwraca 1;
Bcm2835_gpio_fsel(PIN,BCM2835_GPIO_FSEL_OUTP);
//Ustaw port P1_03 na wyjście bez znaku int t_on, t_off;
// t_on czas trwania stanu włączenia = t1 i t_off- stanu wyłączenia = t2
Int d = 100, i, j, flaga=0; // d- współczynnik wypełnienia w procentach, i i j, zmienne pomocnicze do organizacji cykli, flaga- jeśli =0 dioda gaśnie, jeśli =1 to rozbłyskuje
int a=10; // liczba pełnych cykli pracy
podczas)
{
for (j=100; j!=0; j--) //zmień współczynnik wypełnienia ze 100% na 0%
{
t_on=50*d; // znajdź t1
t_off=50*(100-d); // znajdź t2
jeśli (flaga==0) d=d-1; // jeśli dioda LED zanika, zmniejsz cykl pracy
jeśli (flaga==1) d=d+1; // jeśli dioda się zaświeci, zwiększ cykl pracy
Dla (i=10; i!=0; i--) //prześlij 10 impulsów na diodę LED z wyliczonymi parametrami t1 i t2
{
bcm2835_gpio_write(PIN, NISKI);
delayMikrosekundy(t_on);
bcm2835_gpio_write(PIN, WYSOKA);
delayMikrosekundy(t_off);
}
Jeśli (d==0) flaga=1; // jeśli dioda jest wyłączona, zacznij ją włączać
jeśli (d==100) flaga=0; // jeśli dioda osiągnęła maksymalny poziom świecenia, zaczynamy ją gasić
}
A--;
}
return(!bcm2835_close()); // Wyjście z programu
}
Program zapisujemy pod nazwą dimmer.c, kompilujemy i uruchamiamy.
Jak widać, teraz nasza dioda LED powoli gaśnie i powoli świeci. Tak działa PWM. Modulacja szerokości impulsu jest stosowana w wielu obszarach. Obejmuje to sterowanie jasnością lamp i diod LED, sterowanie serwomechanizmami, regulację napięcia w zasilaczach impulsowych (które na przykład znajdują się w komputerze), w przetwornikach cyfrowo-analogowych i analogowo-cyfrowych itp. Nawiasem mówiąc, jeśli wrócimy do naszego obwodu głośnikowego, to za pomocą PWM możesz kontrolować głośność sygnału, a zmieniając częstotliwość, jego ton.
Pamiętasz starą anegdotę z przedmowy do tej części, o tym, że kinooperator powoli wyciąga wtyczkę z gniazdka? Teraz już wiemy, że ten kinooperator, aby płynnie zgasić światło, musi wręcz przeciwnie, bardzo szybko włożyć i wyciągnąć wtyczkę z gniazdka.
Na tym zakończymy tę lekcję. Pozostaje tylko dodać, że PWM jest tak często wykorzystywany w różnych aplikacjach, że producenci sprzętu procesorowego często wbudowują kontroler PWM bezpośrednio w procesor. Tych. ustawiasz parametry potrzebnego sygnału do procesora, a sam procesor bez Twojej pomocy wydaje sygnał, którego potrzebujesz. Jednocześnie bez wydawania zasobów oprogramowania na generowanie tego sygnału. Bcm2835 ma również wbudowany sprzętowy PWM. A ten PWM jest alternatywną funkcją portu GPIO 18 lub P1-12. Aby skorzystać ze sprzętowego PWM, musimy ustawić port P1-12 w tryb ALT5 i ustawić parametry procesora. Ale to zupełnie inna historia...