वेक्टर का उत्पाद क्या है और यदि। निर्देशांक द्वारा दिए गए वैक्टरों की वेक्टर आर्टवर्क
वैक्टर के बीच कोण
हमारे लिए दो वैक्टरों के वेक्टर उत्पाद की अवधारणा को पेश करने के लिए, आपको पहले इन वैक्टरों के बीच कोण के रूप में अवधारणा को समझना होगा।
आइए दो वेक्टर $ \\ ओवरलाइन (α) $ और $ \\ ओवरलाइन (β) $ दें। किसी भी बिंदु $ O $ को ले जाएं और $ \\ ओवरलाइन वैक्टर (α) \u003d \\ ओवरलाइन (OA) $ और $ \\ ओवरलाइन (β) \u003d \\ ओवरलाइन (OB) $ को पोस्ट करें, फिर $ AOB $ कोण होगा इन वैक्टरों के बीच कोण कहा जाता है (चित्र 1)।
पदनाम: $ ∠ (\\ ओवरलाइन (α), \\ ओवरलाइन (β)) $
वेक्टर आर्टवर्क और फॉर्मूला की अवधारणा
परिभाषा 1।
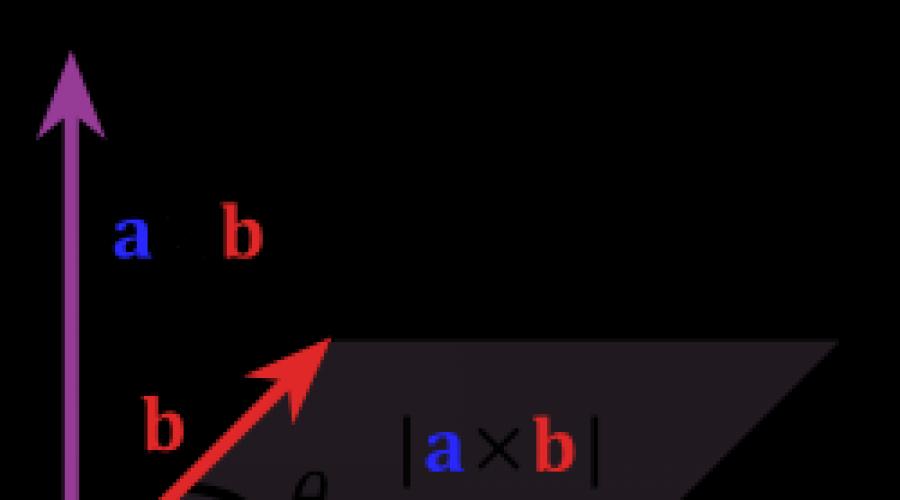
दो वैक्टरों के वेक्टर उत्पाद को वेक्टर, डेटा वैक्टर दोनों के लिए लंबवत कहा जाता है, और इसकी लंबाई इन वैक्टरों के उत्पाद के बराबर डेटा वैक्टर के बीच एक साइन कॉर्नर के साथ होगी, साथ ही साथ इस वेक्टर के साथ दो प्रारंभिकों के साथ एक कठिन अभिविन्यास होता है , कार्टियन समन्वय प्रणाली की तरह।
पदनाम: $ \\ overline (α) x \\ overline (β) $।
गणितीय रूप से, ऐसा लगता है:
- $ | \\ Overline (α) x \\ overline (β) | \u003d | \\ overline (α) || \\ overline (β) | sin\u2061∠ (\\ overline (α), \\ overline (β)) $
- $ \\ overline (α) x \\ overline (β) ⊥ \\ overline (α) $, $ \\ ओवरलाइन (α) x \\ overline (β) ⊥ \\ overline (β) $
- $ (\\ Overline (α) x \\ overline (β), \\ overline (α), \\ overline (β)) $ और $ (\\ overline (i), \\ overline (j), \\ overline (k)) $ समान रूप से उन्मुख (चित्र 2)
जाहिर है, वैक्टर का बाहरी उत्पाद दो मामलों में शून्य वेक्टर के बराबर होगा:
- यदि एक या दोनों वैक्टर की लंबाई शून्य है।
- यदि इन वैक्टरों के बीच कोण $ 180 ^ \\ Circ $ या $ 0 ^ \\ Circ $ (इस मामले में, साइनस शून्य है) होगा।
दृष्टि से देखें कि वेक्टर वेक्टर कैसे स्थित है, समाधान के निम्नलिखित उदाहरणों पर विचार करें।
उदाहरण 1।
वेक्टर $ \\ ओवरलाइन (δ) $ की लंबाई पाएं, जो वैक्टर के वेक्टर उत्पाद का परिणाम होगा, समन्वय $ \\ ओवरलाइन (α) \u003d (0.4.0) $ और $ \\ ओवरलाइन (β) \u003d ( 3.0.0) $।
फेसला.
कार्टेशियन समन्वय अंतरिक्ष में इन वैक्टरों को चित्रित करें (चित्र 3):
चित्रा 3. कार्टेशियन समन्वय अंतरिक्ष में वैक्टर। लेखक 24 - छात्र इंटरनेट एक्सचेंज
हम देखते हैं कि ये वेक्टर क्रमशः $ ऑक्स $ और $ OY $ के अक्ष पर स्थित हैं। नतीजतन, उनके बीच कोण $ 90 ^ \\ circ $ होगा। इन वैक्टरों की लंबाई ज्ञात कीजिए:
$ | \\ Overline (α) | \u003d \\ sqrt (0 + 16 + 0) \u003d $ 4
$ | \\ Overline (β) | \u003d \\ sqrt (9 + 0 + 0) \u003d $ 3
फिर, परिभाषा 1 के अनुसार, हम $ | \\ overline मॉड्यूल (δ) $ प्राप्त करते हैं
$ | \\ Overline (δ) | \u003d | \\ overline (α) || \\ ओवरलाइन (β) | sin90 ^ \\ circ \u003d 4 \\ cdot 3 \\ cdot 1 \u003d 12 $
उत्तर: $ 12 $।
वेक्टर कला की गणना वैक्टर के निर्देशांक के अनुसार
परिभाषा 1 से तुरंत प्रवाह और दो वैक्टरों के लिए एक वेक्टर उत्पाद खोजने की विधि। चूंकि मूल्य के अलावा वेक्टर भी एक दिशा है, इसे केवल स्केलर मान के साथ ढूंढना असंभव है। लेकिन उनके अलावा इन निर्देशांक के साथ वैक्टर खोजने का एक तरीका अभी भी है।
आइए हमें एक वेक्टर $ \\ ओवरलाइन (α) $ और $ \\ ओवरलाइन (β) $ दें, जिसमें क्रमशः $ (α_1, α_2, α_3) $ और $ (β_1, β_2, β_3) को समन्वयित किया जाएगा। फिर वेक्टर काम के वेक्टर (अर्थात्, इसके निर्देशांक निम्नलिखित सूत्र के अनुसार मिल सकते हैं:
$ \\ overline (α) x \\ overline (β) \u003d \\ brint (vmatrix) \\ overline (i) \\ overline (j) & \\ overline (k) \\\\ α_1 α_2 α_3 \\\\ β_1 & β_2 β_3 \\ END (VMATRIX) $
अन्यथा, निर्धारक को प्रकट करना, हमें निम्नलिखित निर्देशांक मिलते हैं
$ \\ overline (α) x \\ overline (β) \u003d (α_2 β_3-α_3 β_2, α_3 β_1-α_1 β_3, α_1 β_2-α_2 β_1) $
उदाहरण 2।
कॉललाइनियर वैक्टर के वेक्टर वेक्टर उत्पाद को $ \\ ओवरलाइन (α) $ और $ \\ ओवरलाइन (β) $ को निर्देशांक $ (0.3.3) $ (- 1,2,6) $ के साथ $ खोजें।
फेसला.
हम उपरोक्त सूत्र का उपयोग करते हैं। प्राप्त करें
$ \\ Overline (α) x \\ overline (β) \u003d \\ n प्रारंभ (vmatrix) \\ overline (i) \\ overline (j) & \\ overline (k) \\\\ 0 और 3 & 3 \\\\ - 1 और 2 & 6 \\ अंत (vmatrix) \u003d (18 -6) \\ overline (i) - (0 + 3) \\ overline (j) + (0 + 3) \\ overline (k) \u003d 12 \\ overline (i) -3 \\ overline (j) ) +3 \\ overline (k) \u003d (12, -3.3) $
उत्तर: $ (12, -3.3) $।
वेक्टर आर्टवर्क की गुण
$ \\ ओवरलाइन (α) $, $ \\ ओवरलाइन (β) $ और $ \\ ओवरलाइन (γ) $, साथ ही $ r∈r $, निम्नलिखित गुणों के मनमाने ढंग से मिश्रित तीन वैक्टर के लिए।
उदाहरण 3।
समांतरोग्राम के क्षेत्र का पता लगाएं जिनके शिखर के पास $ (3.0.0) $ (0.0.0) $ (0.8.0) $ (3.8.0) $ (3.8.0) $ के निर्देशांक हैं।
फेसला.
प्रारंभ में, हम समन्वय स्थान (चित्र 5) में इस समांतरोग्राम दिखाएंगे:
चित्रा 5. समन्वय अंतरिक्ष में पोलोग्राम। लेखक 24 - छात्र इंटरनेट एक्सचेंज
हम देखते हैं कि इस समांतरोग्राम के दोनों पक्षों का निर्माण $ \\ ओवरलाइन (α) \u003d (α) $ और $ \\ ओवरलाइन (β) \u003d (0.8.0) $ के साथ कॉललाइनर वैक्टर का उपयोग करके बनाया गया है। चौथी संपत्ति का उपयोग करके, हमें मिलता है:
$ S \u003d | \\ overline (α) x \\ overline (β) | $
हमें वेक्टर $ \\ ओवरलाइन (α) x \\ overline (β) $ मिलेगा:
$ \\ Overline (α) x \\ overline (β) \u003d \\ brint (vmatrix) \\ overline (i) \\ overline (j) & \\ overline (k) \\\\ 3 & 0 & 0 \\\\ 0 और 8 & 0 \\ en (Vmatrix) \u003d 0 \\ overline (i) -0 \\ overline (j) +24 \\ ओवरलाइन (k) \u003d (0,0,24) $
इसलिये
$ S \u003d | \\ overline (α) x \\ overline (β) | \u003d \\ sqrt (0 + 0 + 24 ^ 2) \u003d 24 $
वेक्टर कला - यह एक छद्म, लंबवत विमान है, जो दो संदेहों पर बनाया गया है, जो त्रि-आयामी यूक्लिडियन अंतरिक्ष में वैक्टरों पर एक बाइनरी ऑपरेशन "वेक्टर गुणा" का परिणाम है। वेक्टर उत्पाद में कम्यूटैटिविटी और एसोसिएटिविटी (एंटी-कम्यूटिव है) के गुण नहीं हैं और वैक्टर के स्केलर उत्पाद के विपरीत, एक वेक्टर है। व्यापक रूप से कई तकनीकी और भौतिक अनुप्रयोगों में उपयोग किया जाता है। उदाहरण के लिए, आवेग का क्षण और लोरेंटज़ पावर गणितीय रूप से एक वेक्टर काम के रूप में दर्ज की गई। वेक्टर उत्पाद वैक्टरों की लंबवतता के "माप" के लिए उपयोगी है - दो वैक्टरों के वेक्टर उत्पाद का मॉड्यूल उनके मॉड्यूल के उत्पाद के बराबर है, यदि वे लंबवत हैं, और शून्य हो जाते हैं यदि वैक्टर समानांतर या एंटीपैरलल होते हैं ।
आप किसी भी आयाम एन की जगह में विभिन्न तरीकों से वेक्टर उत्पाद को निर्धारित कर सकते हैं, और सैद्धांतिक रूप से, एन -1 वैक्टर के उत्पाद की गणना करना संभव है, जिससे उन्हें केवल वेक्टर लंबवत प्राप्त किया जा सकता है। लेकिन यदि कार्य वेक्टर परिणामों के साथ गैर-तुच्छ बाइनरी कार्यों तक ही सीमित है, तो पारंपरिक वेक्टर उत्पाद केवल त्रि-आयामी और सात-आयामी रिक्त स्थानों में परिभाषित किया गया है। एक वेक्टर उत्पाद का परिणाम, स्केलर के रूप में, यूक्लिडियन अंतरिक्ष के मीट्रिक पर निर्भर करता है।
तीन-आयामी आयताकार समन्वय प्रणाली में स्केलर उत्पाद के वैक्टर के निर्देशांक के अनुसार गणना के लिए सूत्र के विपरीत, वेक्टर उत्पाद के लिए सूत्र आयताकार समन्वय प्रणाली के अभिविन्यास पर निर्भर करता है या अन्यथा, इसकी "विरालता"।
परिभाषा:
अंतरिक्ष आर 3 में वेक्टर बी पर एक वेक्टर उत्पाद ए को वेक्टर सी कहा जाता है, जो निम्नलिखित आवश्यकताओं को पूरा करता है:
वेक्टर सी की लंबाई वैक्टर ए और बी के लंबाई के उत्पाद के बराबर है जो उन्हें कोण की साइन पर φ के बीच है:
| सी | \u003d | ए || बी | पाप φ;
वेक्टर सी प्रत्येक वैक्टर ए और बी के लिए ऑर्थोगोनल है;
सी वेक्टर को निर्देशित किया जाता है ताकि एबीसी वैक्टरों का शीर्ष सही हो;
अंतरिक्ष आर 7 के मामले में, तीन वैक्टर ए, बी, सी की एसोसिएटिविटी की आवश्यकता है।
पदनाम:
सी \u003d\u003d\u003d ए × बी

अंजीर। 1. समांतरोग्राम का क्षेत्र वेक्टर उत्पाद मॉड्यूल के बराबर है
वेक्टर के काम के ज्यामितीय गुण:
दो गैर-शून्य वैक्टरों की कॉललाइनरिटी के लिए आवश्यक और पर्याप्त स्थिति उनकी वेक्टर कला के समानता शून्य है।
वेक्टर कला का मॉड्यूल बराबर वर्ग एस वैक्टर की सामान्य शुरुआत को दिए गए संस्करणों पर एक समांतरोग्राम बनाया गया ए। तथा बी (चित्र 1 देखें)।
यदि एक इ। - एकल वेक्टर, ऑर्थोगोनल वैक्टर ए। तथा बी और चुना गया तो Troika ए, बी, ई - सही, और एस - उन पर निर्मित समांतरोग्राम का क्षेत्र (सामान्य शुरुआत के लिए दिया गया), फिर सूत्र वेक्टर उत्पाद के लिए मान्य है:
\u003d एस ई।

रेखा चित्र नम्बर 2। वेक्टर और स्केलर के वैक्टर के स्केलर उत्पाद का उपयोग करते समय समानांतर की मात्रा; बिंदीदार लाइनें एक × बी और वैक्टर ए पर बी × सी पर वेक्टर सी के अनुमान दिखाती हैं, पहला कदम स्केलर कार्यों को ढूंढना है।
यदि एक सी। - कुछ वेक्टर, π
- इस वेक्टर वाले किसी भी विमान, इ। - एकल वेक्टर विमान में झूठ बोल रहा है π
और ऑर्थोगोनल के सी, जी।- एकल वेक्टर, विमान के लिए ऑर्थोगोनल π
और निर्देशित किया कि वैक्टर के शीर्ष ईसीजी सही है, फिर किसी भी विमान के लिए π
वेक्टर ए। फॉर्मूला मेला:
\u003d पीआर ई ए | सी | जी
जहां पीआर ई पर वेक्टर ई का प्रक्षेपण
| सी | वेक्टर मॉड्यूल के साथ
वेक्टर और स्केलर कार्यों का उपयोग करते समय, आप संस्करणों की सामान्य शुरुआत को दिए गए संस्करणों पर निर्मित समानांतरपिपिपि की मात्रा की गणना कर सकते हैं। ए, बी। तथा सी।। तीन वैक्टरों के इस तरह के एक उत्पाद को मिश्रित कहा जाता है।
वी \u003d | ए (बी × सी) |
आंकड़ा बताता है कि यह मात्रा दो तरीकों से मिल सकती है: ज्यामितीय परिणाम "स्केलर" और "वेक्टर" को स्थानों में बदलते समय भी संरक्षित किया जाता है:
वी \u003d ए × बी सी \u003d ए बी × सी
वेक्टर उत्पाद की परिमाण मूल वैक्टर के बीच कोण की साइन पर निर्भर करती है, इसलिए वेक्टर उत्पाद को वैक्टरों के "लंबवतता" की डिग्री के रूप में माना जा सकता है और साथ ही स्केलर उत्पाद को "समांतरता" की डिग्री के रूप में माना जा सकता है । दो एकल वैक्टर का वेक्टर उत्पाद 1 (एकल वेक्टर) है, यदि मूल वैक्टर लंबवत हैं, और 0 (शून्य वेक्टर) के बराबर हैं, यदि वैक्टर समानांतर या विरोधी समानांतर हैं।
कार्टेशियन निर्देशांक में वेक्टर के काम के लिए अभिव्यक्ति
यदि दो वैक्टर ए। तथा बी उनके आयताकार कार्टेशियन निर्देशांक द्वारा परिभाषित, और अधिक सटीक रूप से - एक ऑर्थोऑनॉर्मल आधार में प्रस्तुत किया गया
ए \u003d (एक एक्स, ए वाई, ए जेड)
बी \u003d (बी एक्स, बी वाई, बी जेड)
और समन्वय प्रणाली सही है, तो उनके वेक्टर कला में उपस्थिति है
\u003d (A y b z-z b y, a z b x-x b z, a x b y -a y b x)
इस सूत्र को याद करने के लिए:
i \u003d σε ijk a j b k
कहा पे ε ijk।- लेवी-सिविटा प्रतीक।
वेक्टर के काम की अवधारणा देने से पहले, क्रमबद्ध ट्रिपल ऑफ़ वेक्टर ए →, बी →, सी → के अभिविन्यास के प्रश्न को त्रि-आयामी अंतरिक्ष में बदल दें।
हम एक बिंदु से वैक्टर ए →, बी →, सी → स्थगित करेंगे। ट्रिपल ए →, बी →, सी → वेक्टर सी → की दिशा के आधार पर सही या बाएं का अभिविन्यास सही या बाएं है। वेक्टर सी → के अंत से वेक्टर ए → के बी → के सबसे कम घूर्णन पर, ट्रोका ए →, बी →, सी → का प्रकार निर्धारित किया जाता है।
यदि सबसे छोटा रोटेशन वामावर्तता की दिशा में किया जाता है, तो वैक्टरों की ट्रिपल ए →, बी →, सी → कहा जाता है सहीयदि दक्षिणावर्त - लेवा.
इसके बाद, दो गैर-कॉललाइनर वेक्टर ए → और बी → लें। मैं फिर एक वैक्टर को बी → \u003d ए → और एक सी → \u003d बी → से पोस्ट कर दूंगा। हम वेक्टर को डी → \u003d सी → निर्माण करते हैं, जो एक साथ बी → और सी → दोनों के लिए लंबवत है। इस प्रकार, वेक्टर को स्वयं ही डी → \u003d सी → हम एक बाइकॉन कर सकते हैं, इसे सेट कर सकते हैं या एक दिशा, या विपरीत (चित्रण देखें)।

तीन वैक्टरों को →, बी →, सी → शायद, जैसा कि हम वेक्टर की दिशा के आधार पर सही या बाएं समझ गए थे।
पूर्वगामी से, हम एक वेक्टर काम की परिभाषा दर्ज कर सकते हैं। यह परिभाषा त्रि-आयामी अंतरिक्ष की आयताकार समन्वय प्रणाली में परिभाषित दो वैक्टरों के लिए दी जाती है।
परिभाषा 1।
दो वैक्टर के वेक्टर उत्पाद ए → और बी → हम तीन-आयामी स्थान की आयताकार समन्वय प्रणाली में निर्दिष्ट एक वेक्टर को कॉल करेंगे जैसे कि:
- यदि वैक्टर → और बी → कॉललाइनर हैं, तो यह शून्य होगा;
- यह वेक्टर ए → और वेक्टर बी → यानी के लिए लंबवत होगा। ∠ ए → सी → \u003d ∠ बी → सी → \u003d π 2;
- इसकी लंबाई सूत्र द्वारा निर्धारित की जाती है: सी → \u003d ए → · बी → · पाप ∠ a →, बी →;
- वैक्टर का टुकू एक →, बी →, सी → निर्दिष्ट समन्वय प्रणाली के रूप में एक ही अभिविन्यास है।
वेक्टर ऑफ़ वेक्टर आर्टवर्क ए → और बी → निम्नलिखित पदनाम है: ए → × बी →।
वेक्टर वर्क के निर्देशांक
चूंकि किसी भी वेक्टर के समन्वय प्रणाली में कुछ निर्देशांक होते हैं, इसलिए आप वेक्टर उत्पाद की दूसरी परिभाषा दर्ज कर सकते हैं, जो आपको वैक्टर के निर्दिष्ट निर्देशांक के अनुसार अपने निर्देशांक को खोजने की अनुमति देगा।
परिभाषा 2।
त्रि-आयामी स्थान की आयताकार समन्वय प्रणाली में दो वैक्टरों का वेक्टर उत्पाद → \u003d (ए एक्स; ए वाई; ए जेड) और बी → \u003d (बी एक्स; बी वाई; बी जेड) जिसे वेक्टर सी → \u003d ए → × बी → \u003d (एवाई · बीजेड - एजेड · द्वारा) · मैं → + (एजेड · बीएक्स - कुल्हाड़ी · बीजेड) · जे → + (कुल्हाड़ी · द्वारा · बीएक्स) · के →, जहां मैं →, जे →, के → समन्वय वैक्टर हैं।
वेक्टर उत्पाद को तीसरे क्रम के वर्ग मैट्रिक्स निर्धारक के रूप में पेश किया जा सकता है, जहां पहली पंक्ति या → → →, के →, दूसरी पंक्ति में वेक्टर ए → के निर्देशांक, और तीसरा - वेक्टर बी के निर्देशांक शामिल हैं → किसी दिए गए आयताकार समन्वय प्रणाली में, मैट्रिक्स का यह निर्धारक यह इस तरह दिखता है: सी → \u003d ए → × बी → \u003d i → j → k → axayazbxbybz
पहली पंक्ति के तत्वों के लिए इस निर्धारक को समझना, हम समानता प्राप्त करते हैं: सी → \u003d ए → × बी → \u003d मैं → जे → के → axazbxbybz \u003d ayazbybx · i → axazbxbz · j → + axaybxby → k → \u003d \u003d → × बी → \u003d (एवाई · बीजेड - एजेड · द्वारा) · मैं → + (एजेड · बीएक्स - कुल्हाड़ी · बीजेड) · जे → + (कुल्हाड़ी · बाय - एवाई · बीएक्स) · के →
वेक्टर काम की गुण
यह ज्ञात है कि निर्देशांक में वेक्टर उत्पाद मैट्रिक्स सी → \u003d ए → × बी → \u003d i → j → k → → a x a y z z b x b y b z के निर्धारक लगता है मैट्रिक्स के निर्धारक के गुण निम्नलिखित प्रदर्शित करता है वेक्टर कार्य की गुण:
- एंटी-कम्यूटैटिविटी ए → × बी → \u003d - बी → × ए →;
- वितरण एक (1) → + ए (2) → × बी \u003d ए (1) → × बी → + ए (2) → × बी → या → × बी (1) → + बी (2) → \u003d ए → × बी (1) → + ए → × बी (2) →;
- एसोसिएटिविटी λ · ए → × बी → \u003d λ · ए → × बी → या → × (λ · बी →) \u003d λ · ए → × बी →, जहां λ एक मनमानी वैध संख्या है।
इन गुणों में मुश्किल सबूत नहीं हैं।
उदाहरण के लिए, हम वेक्टर उत्पाद की एंटी-कम्यूटिव संपत्ति साबित कर सकते हैं।
विरोधी-आभूषण का प्रमाण
परिभाषा के अनुसार → × बी → \u003d मैं → जे → के → ए एक्स ए वाई ए जेड बी एक्स बी वाई बी जेड और बी → के → \u003d i → j → k → b x b y b z a x a y z। और यदि मैट्रिस की दो पंक्तियां स्थानों में पुनर्विचार करते हैं, तो मैट्रिक्स के निर्धारक का मूल्य विपरीत में बदलना चाहिए, इसलिए, ए → × बी → \u003d I → j → k → axayazbxbybz \u003d - i → j → k → Bxbybzaxaz \u003d - बी → × ए → वह और वेक्टर काम की एंटी-कम्यूटैटिविटी साबित करता है।
वेक्टर कला - उदाहरण और समाधान
ज्यादातर मामलों में, तीन प्रकार के कार्य होते हैं।
पहले प्रकार के कार्यों में, दो वैक्टर की लंबाई और उनके बीच कोण आमतौर पर सेट होते हैं, और आपको वेक्टर उत्पाद की लंबाई खोजने की आवश्यकता होती है। इस मामले में, निम्न सूत्र सी → \u003d ए → · बी → पाप ∠ ए →, बी → का उपयोग करें।
उदाहरण 1।
वैक्टर के वेक्टर उत्पाद की लंबाई एक → और बी →, यदि यह एक → \u003d 3, बी → \u003d 5, ∠ ए →, बी → \u003d π 4 ज्ञात है।
फेसला
वैक्टर के वेक्टर उत्पाद की लंबाई की परिभाषा का उपयोग → और बी → मैं इस कार्य को हल करता हूं: ए → × बी → \u003d ए → · बी → · पाप ∠ ए →, बी → \u003d 3 · 5 · पाप π 4 \u003d 15 2 2।
उत्तर: 15 2 2 .
दूसरे प्रकार की वस्तुएं वैक्टर के निर्देशांक से संबंधित हैं, उनमें एक वेक्टर उत्पाद, इसकी लंबाई इत्यादि। निर्दिष्ट वैक्टर के प्रसिद्ध निर्देशांक के माध्यम से खोजा गया a → \u003d (एक x; a y; a z) तथा B → \u003d (b x; b y; b z) .
इस प्रकार के कार्य के लिए, आप बहुत सारे कार्य विकल्पों को हल कर सकते हैं। उदाहरण के लिए, वैक्टर के निर्देशांक एक → और बी →, लेकिन फॉर्म के समन्वय वैक्टर पर उनके अपघटन को दिया जा सकता है। बी → \u003d बी एक्स · मैं → + बी वाई J → + बी जेड · के → और सी → \u003d ए → × बी → \u003d (एवाई · बीजेड - एजेड · द्वारा) · मैं → + (एजेड · बीएक्स - कुल्हाड़ी · बीजेड) · जे → + (कुल्हाड़ी · द्वारा · बीएक्स) · के →, या वैक्टर ए → और बी → उनकी शुरुआत और अंत के बिंदुओं के निर्देशांक द्वारा सेट किया जा सकता है।
निम्नलिखित उदाहरणों पर विचार करें।
उदाहरण 2।
आयताकार समन्वय प्रणाली में, दो वैक्टर ए → \u003d (2; 1; - 3), बी → \u003d (0; - 1; 1) दिया जाता है। उनकी वेक्टर कला खोजें।
फेसला
दूसरी परिभाषा पर, हमें निर्दिष्ट निर्देशांक में दो वैक्टर का एक वेक्टर उत्पाद मिलता है: ए → × बी → \u003d (एवाई · बीजेड - एजेड · द्वारा) · मैं → + (एजेड · बीएक्स - कुल्हाड़ी · बीजेड) · जे → + (कुल्हाड़ी · द्वारा · bx) · k → \u003d \u003d (1 · 1 - (- 3) · (- 1)) · मैं → + (- 3) · 0 - 2 · 1) · जे → + ( 2 · (- 1) - 1 · 0) · के → \u003d - 2 मैं → 2 जे → - 2 के →।
यदि आप मैट्रिक्स निर्धारक के माध्यम से एक वेक्टर उत्पाद रिकॉर्ड करते हैं, तो इस उदाहरण का समाधान निम्नानुसार है: ए → × बी → \u003d मैं → जे → के → AXAYAZBXBYBZ \u003d I → जे → के → 2 1 - 3 0 - 1 1 \u003d - 2 मैं → - 2 जे → - 2 के →।
उत्तर: ए → × बी → \u003d - 2 मैं → 2 जे → - 2 के →।
उदाहरण 3।
वैक्टर के वेक्टर उत्पाद की लंबाई खोजें I → - जे → और मैं → + जे → + के →, जहां मैं →, जे →, के → - आयताकार कार्टेशियन समन्वय प्रणाली के ऑर्थोप्स।
फेसला
इसके साथ शुरू करने के लिए, हम इस आयताकार समन्वय प्रणाली में निर्दिष्ट वेक्टर उत्पाद I → - जे → → → + जे → + के → के निर्देशांक पाएंगे।
यह ज्ञात है कि वैक्टर I → - जे → और मैं → + जे → + के → क्रमशः निर्देशांक (1; - 1; 0) और (1; 1; 1) है। मैट्रिक्स के निर्धारक का उपयोग करके वेक्टर उत्पाद की लंबाई पाएं, फिर हमारे पास → - जे → × मैं → + जे → के → 1 - 1 0 1 1 1 \u003d - मैं → - जे → + 2 के →।
नतीजतन, वेक्टर उत्पाद i → j → × i → + j → + k → एक दिए गए समन्वय प्रणाली में समन्वय (- 1; - 1; 2) है।
हमें सूत्र के अनुसार वेक्टर उत्पाद की लंबाई मिल जाएगी (अनुभाग को वेक्टर की लंबाई ढूंढना देखें): i → - जे → × मैं → + जे → + के → \u003d - 1 2 + - 1 2 + 2 2 \u003d 6।
उत्तर: मैं → - जे → × मैं → + जे → + के → \u003d 6। ।
उदाहरण 4।
एक आयताकार डिकार्टुलर समन्वय प्रणाली में, तीन बिंदुओं के निर्देशांक (1, 0, 1), बी (0, 2, 3), सी (1, 4, 2) सेट हैं। एक ही समय में कुछ वेक्टर लंबवत एक बी → और एक सी → खोजें।
फेसला
वैक्टर ए बी → और एक सी → क्रमशः निम्नलिखित निर्देशांक (- 1; 2; 2) और (0; 4; 1) है। वैक्टरों के एक वेक्टर उत्पाद को बी → और सी → पाया गया है, यह स्पष्ट है कि यह परिभाषा के अनुसार एक लंबवत वेक्टर है और बी → और एक सी → के लिए, यानी, हमारे कार्य का समाधान है। हम इसे एक b → × × → \u003d i → j → k → 1 2 2 0 4 1 \u003d - 6 i → + j → - 4 k →।
उत्तर: - 6 मैं → + जे → - 4 के →। - लंबवत वैक्टर में से एक।
तीसरे प्रकार के कार्य वेक्टर कला गुणों का उपयोग करने पर केंद्रित हैं। किसके उपयोग के बाद, हमें किसी दिए गए कार्य का समाधान प्राप्त होगा।
उदाहरण 5।
वैक्टर ए → और बी → लंबवत और उनकी लंबाई क्रमशः बराबर है, 3 और 4। वेक्टर उत्पाद की लंबाई पाएं 3 · ए → - बी → × ए → 2 · बी → \u003d 3 · ए → × ए → - 2 · बी → + - बी → × ए → - 2 · बी → \u003d \u003d 3 · ए → × ए → + 3 · ए → × - 2 · बी → + - बी → × ए → + - बी → × - 2 · बी →।
फेसला
वेक्टर उत्पाद की विभाजन की संपत्ति से, हम 3 · ए → - बी → × ए → 2 · बी → \u003d 3 · ए → × ए → - 2 · बी → + - बी → → - 2 · बी → \u003d \u003d 3 · ए → × ए → + 3 · ए → × - 2 · बी → + - बी → × ए → + - बी → × 2 · बी →
एसोसिएटिविटी की संपत्ति से, हम अंतिम अभिव्यक्ति में वेक्टर कार्यों के संकेत के लिए संख्यात्मक गुणांक ले लेंगे: 3 · ए → × ए → + 3 · ए → × - 2 · बी → + - बी → × ए → + - बी → × - 2 · बी → \u003d \u003d 3 · ए → × ए → + 3 · (- 2) · ए → × बी → + (- 1) · बी → × ए → + (- 1) · (- 2 ) · बी → × बी → \u003d \u003d 3 · ए → × ए → - 6 · ए → × बी → - बी → × ए → + 2 · बी → × बी →
वेक्टर एक → × ए → और बी → × बी → बराबर 0, एक → × ए → \u003d ए → → → · पाप 0 \u003d 0 और बी → × बी → \u003d बी → · बी → · पाप 0 \u003d 0, फिर 3 · ए → × ए → - 6 · ए → × बी → - बी → × ए → + 2 · बी → × बी → \u003d - 6 · ए → × बी → - बी → × ए →। ।
वेक्टर उत्पाद की एंटी-कम्यूटैटिविटी से, 6 · ए → × बी → - बी → → → \u003d - 6 · ए → × बी → (- 1) · ए → × बी → \u003d - 5 · ए → × बी → । ।
वेक्टर के काम के गुणों का उपयोग करके, हम समानता 3 · ए → - बी → × ए → - 2 · बी → \u003d \u003d - 5 · ए → × बी → प्राप्त करते हैं।
हालत से, वैक्टर ए → और बी → लंबवत, यानी, उनके बीच कोण π 2 के बराबर है। अब यह केवल संबंधित सूत्रों में पाए गए मूल्यों को प्रतिस्थापित करने के लिए बनी हुई है: 3 · ए → - बी → × ए → - 2 · बी → \u003d - 5 · ए → × बी → \u003d 5 · ए → × बी → \u003d 5 · ए → · बी → · पाप (ए →, बी →) \u003d 5 · 3 · 4 · पाप π 2 \u003d 60।
उत्तर: 3 · ए → - बी → × ए → - 2 · बी → \u003d 60।
निर्माण वैक्टर के वेक्टर उत्पाद की लंबाई → × बी → \u003d ए → · बी → पाप ∠ ए →, बी → के बराबर है। चूंकि यह पहले से ही ज्ञात है (स्कूल पाठ्यक्रम से) कि त्रिभुज क्षेत्र इन पार्टियों के बीच कोने से गुणा करने वाले अपने दोनों पक्षों की लंबाई के आधे काम के बराबर है। इसलिए, वेक्टर उत्पाद की लंबाई समांतरोग्राम के क्षेत्र के बराबर है - एक डबल त्रिकोण, अर्थात् वैक्टर के रूप में पार्टियों का उत्पाद ए → और बी →, एक बिंदु से लंबित, कोने साइनस के बीच उन्हें पाप ∠ a →, बी →।
यह वेक्टर उत्पाद का ज्यामितीय अर्थ है।

वेक्टर कार्य का भौतिक अर्थ
मैकेनिक्स में, भौतिकी के वर्गों में से एक, वेक्टर उत्पाद के लिए धन्यवाद, आप अंतरिक्ष के बिंदु के सापेक्ष बल के क्षण को निर्धारित कर सकते हैं।
परिभाषा 3।
पावर एफ → बिंदु पर लागू होने के अंत में, बिंदु के सापेक्ष हम निम्नलिखित वेक्टर उत्पाद को एक बी → एफ → समझते हैं।
यदि आपको पाठ में कोई गलती दिखाई देती है, तो कृपया इसे चुनें और Ctrl + Enter दबाएं
अंग्रेज़ी: विकिपीडिया साइट को और अधिक सुरक्षित बना रहा है। आप एक पुराने वेब ब्राउज़र का उपयोग कर रहे हैं जो भविष्य में विकिपीडिया से कनेक्ट नहीं हो पाएगा। कृपया अपने डिवाइस को अपडेट करें या अपने आईटी व्यवस्थापक से संपर्क करें।
中文: 维基 科 正 在 使 使 更加 更加 全 全 您 您 浏览 这 这 在 无法 无法 连接 维基 维基 请 请 更 更 您 的 设备 或 联络 您 的 的 管理员 以下 以下 更 更 长 更 更 具 技术性 的 更 长 更 更 具 技术性 的 长更 (仅 英语)।
Español: विकिपीडिया एस्टा Haciendo el Sitio Más Seguro। Usted está utilizando un navegador वेब viejo que no será capaz de conecarse एक विकिपीडिया एन एल Futuro। वास्तविकता सु डिस्पिटिवो ओ एक एसयू प्रशासक सूचनाएं संपर्क करें। Más abajo hay una realizización más larga y más técnica en inglés।
ﺎﻠﻋﺮﺒﻳﺓ: ويكيبيديا تسعى لتأمين الموقع أكثر من ذي قبل. أنت تستخدم متصفح وب قديم لن يتمكن من الاتصال بموقع ويكيبيديا في المستقبل. يرجى تحديث جهازك أو الاتصال بغداري تقنية المعلومات الخاص بك. يوجد تحديث فني أطول ومغرق في التقنية باللغة الإنجليزية تاليا.
Français: विकिपीडिया वीए Biantôt Augmenter La Sécurité de Son साइट। Vous utilisez actuellement un navigateur वेब acien, qui ne pourra plus से कनेक्टर à विकिपीडिया LORSQue CE SERA FAIT। Merci de Mettre à jour votre appareil ou de contacter votre afformatique à cette fin। डीई सूचना supplémentaires प्लस तकनीक et englais sont disponibles ci-dessous।
日本語: ウィキペディア で は サイト の セキュリティ を 高 め て い い バージョン が が 今後 今後 今後 今後 ウィキペディア 接続 でき でき なく なる 能 性 性 あり あり ます デバイス を 更 する する か か 管理 管理 者 ご ご 相談 ください 管理技術 面 詳しい 詳しい 更 更 情報 は 以下 に で 提供 し て い ます।
Deutsch: विकिपीडिया Erhöht Die Sicherheit der वेबसेइट मरो। डु Benutzt Einen Alen WebBrowser, Zukunft Nicht Mehr Auf Wikipedia Zugreifen Können Wird में डेर। Bitte Aktualisiere Dein Gerät Oder Sprich Deinen IT- प्रशासक a। Ausführlichere (und Technisch Detaillierrete) अंग्रेजी Sprache में Hinweise Findest Du Unten।
इटालियनो: विकिपीडिया STA RENDENDO IL SITO PIù SICURO। स्टाई यूएसएंडो संयुक्त राष्ट्र ब्राउजर वेब चे नॉन एसएआर ग्रेडो डी कॉनमेंटी में फ्यूचरो में एक विकिपीडिया। प्रति Favore, aggiorna il tuo dofismitivo o contatta il tuo amministratore informatico। Basso è disponibile un aggiornato più dettagliato e tecnico में più।
Magyar: Biztonságosabb Lesz एक विकिपीडिया। एक बोन्गेज़ज़, अमित हैज़्नाल्ज़, एनईएम लेस्ज़ केपीस Kapcsolódni a Jövőben। Használj modernebb szoftvert vagy jelezd एक problémát एक rendsergazdádnak। Alább Olvashatod एक Részletesebb Magyarázatot (अंगोलुल)।
स्वेनस्का: विकिपीडिया गोर सिदान मेर साकर। Du använder en äldre webbläsare som inte kommer att kunna läsa wikipedia i framtiden। Uppdatera din eller kontakta din it-straindatör endet। Det Finns en längre och mer teknisk förklaring på engelska längre ned।
हिन्दी: विकिपीडिया साइट को और अधिक सुरक्षित बना रहा है। आप एक पुराने वेब ब्राउज़र का उपयोग कर रहे हैं जो भविष्य में विकिपीडिया से कनेक्ट नहीं हो पाएगा। कृपया अपना डिवाइस अपडेट करें या अपने आईटी व्यवस्थापक से संपर्क करें। नीचे अंग्रेजी में एक लंबा और अधिक तकनीकी अद्यतन है।
हम असुरक्षित टीएलएस प्रोटोकॉल संस्करणों, विशेष रूप से टीएलएसवी 1.0 और टीएलएसवी 1.1 के लिए समर्थन को हटा रहे हैं, जो आपका ब्राउज़र सॉफ़्टवेयर हमारी साइट से कनेक्ट करने के लिए निर्भर करता है। यह आमतौर पर पुराने ब्राउज़र, या पुराने एंड्रॉइड स्मार्टफोन के कारण होता है। या कॉर्पोरेट या व्यक्तिगत "वेब सुरक्षा" सॉफ़्टवेयर से हस्तक्षेप किया जा सकता है, जो वास्तव में कनेक्शन सुरक्षा को डाउनग्रेड करता है।
आपको अपने वेब ब्राउज़र को अपग्रेड करना होगा या अन्यथा हमारी साइट तक पहुंचने के लिए इस समस्या को ठीक करना होगा। यह संदेश 1 जनवरी, 2020 तक रहेगा। उस तारीख के बाद, आपका ब्राउज़र हमारे सर्वर से कनेक्शन स्थापित करने में सक्षम नहीं होगा।
परिभाषा। वेक्टर ए पर वेक्टर ए के वेक्टर को [", बी] (या एलएक्सबी) प्रतीक द्वारा नामित वेक्टर कहा जाता है, जैसे कि 1) वेक्टर की लंबाई [ए, बी] बराबर है (पी, जहां वाई वैक्टर ए और बी (चित्र 3) के बीच कोण है; 2) वेक्टर [ए, बी) वैक्टर के लिए लंबवत ए और बी, यानी इन वैक्टरों के विमान के लिए लंबवत; 3) वेक्टर [ए, बी] को निर्देशित किया जाता है ताकि इस वेक्टर के अंत से, ए से बी तक सबसे छोटा घूर्णन वामावर्त (चित्र 32) दिखाई दे रहा है। अंजीर। अन्य शब्दों में 32 Fig.31, वैक्टर ए, बी और [ए, बी) सही तीन वैक्टर बनाएं, यानी दाहिने हाथ की बड़ी, सूचकांक और मध्य उंगलियों के रूप में स्थित है। यदि वैक्टर ए और बी कॉललाइनर, हम मानते हैं कि [ए, बी] \u003d 0. परिभाषा के अनुसार, वेक्टर उत्पाद की लंबाई संख्यात्मक रूप से एसए समांतरोग्राम क्षेत्र (चित्र 33) के बराबर होती है, जो चर वैक्टर ए और बी के रूप में निर्मित होती है पक्षों पर: 6.1। वेक्टर वर्क की गुण 1. वेक्टर उत्पाद शून्य वेक्टर के बराबर होता है और केवल जब परिवर्तनीय वैक्टरों में से कम से कम एक शून्य होता है या जब इन कॉललाइनर वैक्टर (यदि वैक्टर ए और बी कॉललाइनर, तो उनके बीच कोण या तो 0 या है 7 जी)। इस तथ्य से प्राप्त करना आसान है कि यदि आप किसी भी वेक्टर के जलन के साथ शून्य वेक्टर को गिनते हैं, तो वैक्टर ए और बी की कॉललाइनरिटी की स्थिति को तो व्यक्त किया जा सकता है। 2. वेक्टर उत्पाद विरोधी कम्यूटिव है, यानी हमेशा। वास्तव में, वैक्टर (ए, बी) और एक ही लंबाई और कॉललाइनर है। इन वैक्टरों के निर्देश वेक्टर के अंत की वजह से विपरीत हैं [ए, बी] ए से बी तक सबसे छोटा घूर्णन दक्षिणावर्त के खिलाफ देखा जाएगा, और वेक्टर के अंत से [बी, ए] - दक्षिणावर्त ( चित्र 34)। 3. वेक्टर उत्पाद के अतिरिक्त सम्मान के साथ एक वितरण संपत्ति है। 4. संख्यात्मक गुणक एल वेक्टर उत्पाद 6.2 के संकेत के लिए बनाया जा सकता है। निर्देशांक द्वारा निर्दिष्ट वैक्टर का वेक्टर उत्पाद वैक्टर को चलाता है और आधार में उनके निर्देशांक द्वारा भी निर्धारित किया जाता है। वेक्टर उत्पाद की वितरण संपत्ति का उपयोग करके, हमें निर्देशांक द्वारा दिए गए वैक्टरों का एक वेक्टर उत्पाद मिलता है। मिश्रित काम। हम समन्वय orts (चित्र 35) के वेक्टर कार्यों को पीछे हटाते हैं: इसलिए, वैक्टर के वेक्टर उत्पाद के लिए ए और बी, हम फॉर्मूला (3) से प्राप्त करते हैं (3) निम्नलिखित अभिव्यक्ति सूत्र (4) को प्रतीकात्मक, आसानी से यादगार में लिखा जा सकता है फॉर्म, यदि आप तीसरे क्रम के निर्धारक का उपयोग करते हैं: 1st लाइन के तत्वों के लिए निर्धारक को विघटित करें, हम (4) प्राप्त करते हैं। उदाहरण। 1. वेक्टर वांछित क्षेत्र में निर्मित समांतरोग्राम का क्षेत्र ढूंढें ताकि हम पाते हैं कि 2 कहां से। एक त्रिकोण क्षेत्र (चित्र 36) खोजें। यह स्पष्ट है कि क्षेत्र बी "डी त्रिभुज एयू वी के बारे में वर्ग एस समांतरोग्राम के बराबर है। वेक्टर उत्पाद की गणना (ए, बी | वैक्टर ए \u003d ओए और बी \u003d ओएच, हमें एक टिप्पणी मिलती है। वेक्टर उत्पाद है सहयोगी नहीं, यानी समानता ((ए, बी), सी) \u003d [ए, | बी, सी)) सामान्य मामले में गलत है। उदाहरण के लिए, जब ए \u003d एसएस जे, हमारे पास § 7. मिश्रित उत्पाद है वैक्टर उन्हें तीन वैक्टर ए, बी और एस लेते हैं। वेक्टर ए और 1\u003e जल्द ही ले जाएं। नतीजतन, हम वेक्टर [ए, 1\u003e] प्राप्त करते हैं। गुणा करें यह वेक्टर सी के लिए स्केलर है: (के बी), सी)। संख्या ([ए, बी], ई) को वैक्टर ए, बी के मिश्रित उत्पाद कहा जाता है। के साथ और प्रतीक (ए, 1), ई) द्वारा इंगित किया गया। 7.1। मिश्रित काम के ज्यामितीय अर्थ पोस्टपोन वैक्टर ए , बी और व्यतीत बिंदु ओ (चित्र 37) से। यदि सभी चार अंक ओह, ए, बी, सी एक ही विमान में झूठ बोलते हैं (वैक्टर ए, बी और सी को इस मामले में कंपनी में बुलाया जाता है), फिर एक मिश्रित उत्पाद ( [ए, बी], सी) \u003d 0. यह इस तथ्य से आता है कि वेक्टर [ए, बी | विमान के लिए लंबवत है जिसमें वैक्टर ए और 1 परिक्रमा किया जाता है ", इसलिए, वेक्टर के साथ। / यदि टी अंक ओ, ए, बी, सी एक ही फ्लैट-हड्डी (वैक्टर ए, बी और noncomplaunar के साथ) में झूठ नहीं बोल रहे हैं, हम ओए, ओबी और समानांतर (अंजीर के किनारों पर निर्माण करते हैं। 38 ए)। वेक्टर उत्पाद की परिभाषा के अनुसार, हमारे पास (ए, बी) \u003d तो के साथ, जहां एक ओएडीबी समांतर क्षेत्र है, और सी एक वेक्टर है, वैक्टर ए और बी और बी और इस तरह के troika a, b, c - सही है , अर्थात वैक्टर ए, बी और सी क्रमशः, दाहिने हाथ की बड़ी, सूचकांक और मध्यम उंगलियों के रूप में स्थित हैं (चित्र 38 बी)। पिछले समानता के दोनों हिस्सों को वेक्टर सी में दायां स्केलर तक गुणा करना, हम निर्दिष्ट निर्देशांक के वैक्टर के वेक्टर उत्पाद को प्राप्त करते हैं। मिश्रित काम। आरजीएस सी की संख्या एच की ऊंचाई के बराबर है, "+" चिह्न के साथ लिया गया है, यदि तीव्र (ट्रोका ए, बी, सी - दाएं) के साथ वैक्टर के बीच कोण (ट्रोका ए, बी, सी - राइट), और हस्ताक्षर के साथ "-" यदि कोण बेवकूफ (ट्रोका ए, बी, एस - बाएं) है, तो इस प्रकार, वेक्टर ए, बी और वॉल्यूम वी के बराबर उत्पाद समानांतर, इन वैक्टरों पर आरआईपी के रूप में बनाया गया, अगर ट्रिका ए, बी, सी - राइट, और -वी, अगर ट्रोका ए, बी, एस - बाएं। मिश्रित काम के ज्यामितीय अर्थ के आधार पर, यह निष्कर्ष निकाला जा सकता है कि, किसी अन्य आदेश में टीसी वैक्टर ए, बी और सी को गुणा करना, हम हमेशा या तो +7 या -के प्राप्त करेंगे। उत्पादन का संकेत। 38 रखरखाव केवल इस पर निर्भर करेगा क्योंकि त्रिक चर वैक्टर बन रहे हैं - दाएं या बाएं। यदि वैक्टर ए, बी, सही ट्रोका के साथ, फिर त्रिजी बी, सी, ए और सी, ए, बी भी सही हैं। उसी समय, तीनों सैनिक बी, और, के साथ; ए, एस, बी और एस, बी, ए - बाएं। इस प्रकार, (ए, बी, सी) \u003d (बी, एस, ए) \u003d (एस, ए, बी) \u003d - (बी, ए, सी) \u003d - (ए, एस, बी) \u003d - (एस, बी, लेकिन अ)। ईशेरेज़ हम जोर देते हैं कि वैक्टर का मिश्रित उत्पाद नूडुचोगा के बराबर होता है जब परिवर्तनीय वैक्टर ए, बी, एक साथी के साथ, (ए, बी, एक साथी के साथ) 7.2। निर्देशांक में मिश्रित काम वैक्टर ए, बी, के आधार पर उनके निर्देशांक द्वारा निर्धारित किया जाता है I, j, k: a \u003d (x \\, y \\, z]), बी \u003d (x2, y2\u003e z2), सी \u003d (x3, uz, 23)। हम उनके मिश्रित काम (ए, बी, सी) के लिए अभिव्यक्ति पाते हैं। हमारे पास आधार I, जे, के, तीसरे आदेश निर्धारक के बराबर निर्देशांक द्वारा दिए गए वैक्टरों का एक मिश्रित उत्पाद है, जिनकी पंक्तियां परिवर्तनीय वैक्टर के पहले, दूसरे और तीसरे के निर्देशांक से तदनुसार रचना की जाती हैं। वैक्टर और वाई \\, जेड |) के साथी के लिए आवश्यक और पर्याप्त स्थिति, बी \u003d (एच यू 2. 22), सी \u003d (जेएचजेड, यूजेड, 23) निम्नलिखित तरीके से दर्ज की जाएगी जेड, एजी 2 वाई 2 -2 \u003d 0। अल्ट्रा उदाहरण। जांचें कि वैक्टर "\u003d (7,4,6), बी \u003d (2, 1,1), सी \u003d (1 9, II, 17) हैं। विचाराधीन वैक्टरों को इस पर निर्भर किया जाएगा कि यह शून्य होगा या नहीं, पहले स्ट्रिंग के तत्वों के अनुसार इसे विघटित करने के लिए कोई निर्धारक नहीं है, हमें डी \u003d 7-6- 4- 15 + 6-3 \u003d 0 मिलता है ^ - एक साथी के साथ वैक्टर एन, बी। 7.3। डबल वेक्टर उत्पाद डबल वेक्टर उत्पाद [ए, [बी, सी]] वैक्टर ए और [बी, सी] के लिए एक वेक्टर लंबवत है। इसलिए, यह वैक्टर बी और सी के विमान में स्थित है और इन वैक्टरों पर विघटित किया जा सकता है। यह दिखाया जा सकता है कि सूत्र मान्य है [ए, [!\u003e, एस]] \u003d बी (ए, ई) - (ए, के) के साथ। व्यायाम 1. तीन वैक्टर एवी \u003d सी, एफ? \u003d ओ और सीए \u003d बी त्रिभुज के किनारों के रूप में कार्य करते हैं। ए, बी और मध्ययन एम, डीएन, सीपी त्रिकोण के साथ मेल खाने वाले वैक्टर के माध्यम से एक्सप्रेस। 2. वेक्टर पी और क्यू को वेक्टर पी + क्यू से किस स्थिति से संबंधित होना चाहिए, आधे में उनके बीच कोण को विभाजित किया जाना चाहिए? यह माना जाता है कि सभी तीन वैक्टरों को सामान्य शुरुआत के लिए जिम्मेदार ठहराया जाता है। 3. वैक्टर ए \u003d 5 पी + 2 क्यू और बी \u003d पी - 3 क्यू में निर्मित समांतरोग्राम की लंबाई की गणना करें, अगर यह ज्ञात है कि | पी | \u003d 2 वी / 2, | क्यू | \u003d 3 एच- (पी 7 सीआई) \u003d एफ। 4. Rhombus के एक और बी पक्ष के रूप में Rhombus का पुनर्मूल्यांकन, साबित करें कि तिरछे rhombus परस्पर लंबवत लंबवत हैं। 5. वैक्टर ए \u003d 4i + 7 जे + 3 के और बी \u003d 31 - 5 जे + के। 6. एक इकाई वेक्टर ए 0, समांतर वेक्टर ए \u003d (6, 7, -6) खोजें। 7. वेक्टर ए \u003d एल + जे-केए वेक्टर बी \u003d 21 - जे -3 के प्रक्षेपण का पता लगाएं। 8. वैक्टर के बीच कोण का पता लगाएं, यदि एक (-4,0,4), (-1,6,7), सी (1,10,9) में है। 9. पी ° के एक वेक्टर को ढूंढें, एक ही समय में लंबवत वेक्टर ए \u003d (3, 6, 8) और बैल धुरी। 10. समानांतर के विकर्णों के बीच कोने साइनस की गणना करें, वैक्टर ए \u003d 2i + जे-के, बी \u003d आई -3 जे + के पक्षों के रूप में निर्मित। वेक्टर ए \u003d 31 + 2 जे - 5 के, बी \u003d i- j + 4knc \u003d i-3J + K, यदि आधार समांतर ए और i) में बनाया गया है, तो ऊंचाई एच समानांतर। जवाब