Αντηχητικό κύκλωμα αντί για PWM. Διαμόρφωση πλάτους παλμού, PWM, PWM, έλεγχος, ρύθμιση, ρυθμιστής, διαμορφωτής
Διαβάστε επίσης
8. Διαμόρφωση πλάτους παλμού σε μετατροπείς
8.1. Γενικές πληροφορίες
Οι αρχές του ελέγχου και της διαμόρφωσης παλμών συζητούνται στο Κεφ. 4 στο παράδειγμα του απλούστερου κυκλώματος ρυθμιστή DC. Ταυτόχρονα, δίνονται ορισμοί για τους κύριους τύπους διαμόρφωσης παλμών που χρησιμοποιούνται στη θεωρία των συστημάτων γραμμικών παλμών, οι οποίοι αντιστοιχούν στην πρακτική ελέγχου των μετατροπέων παλμικού DC.
Ωστόσο, η διαμόρφωση πλάτους παλμού των τάσεων ή των ρευμάτων στους μετατροπείς AC έχει έναν ελαφρώς διαφορετικό ορισμό στα ηλεκτρονικά ισχύος, λαμβάνοντας υπόψη τα χαρακτηριστικά του PWM κατά την επίλυση προβλημάτων μετατροπής ηλεκτρικής ενέργειας σε εναλλασσόμενο ρεύμα. Όπως ορίζεται από το IEC 551-16-30, η διαμόρφωση πλάτους παλμού αναφέρεται στον έλεγχο παλμών στον οποίο το πλάτος ή η συχνότητα των παλμών, ή και τα δύο, διαμορφώνονται εντός μιας περιόδου της θεμελιώδους συχνότητας προκειμένου να δημιουργηθεί ένα συγκεκριμένο σχήμα της κυματομορφής της τάσης εξόδου . Στις περισσότερες περιπτώσεις, το PWM πραγματοποιείται για να εξασφαλιστεί ημιτονοειδής τάση ή ρεύμα, δηλαδή να μειωθεί το επίπεδο υψηλότερων αρμονικών σε σχέση με τη θεμελιώδη (πρώτη) αρμονική και ονομάζεται ημιτονοειδές. Υπάρχουν οι ακόλουθες κύριες μέθοδοι για τη διασφάλιση της ημιτονικότητας: αναλογικό PWM και οι τροποποιήσεις του. επιλεκτική (επιλεκτική) καταστολή υψηλότερων αρμονικών. υστέρηση ή διαμόρφωση δέλτα.
διανυσματική διαμόρφωση χώρου.
Η κλασική έκδοση της οργάνωσης του αναλογικού ημιτονοειδούς PWM είναι η αλλαγή του πλάτους των παλμών που σχηματίζουν την τάση εξόδου (ρεύμα) συγκρίνοντας ένα σήμα τάσης ενός δεδομένου σχήματος, που ονομάζεται αναφορά ή αναφορά, με ένα τριγωνικό σήμα τάσης που έχει υψηλότερη συχνότητα και ονομάζεται σήμα φορέα. Το σήμα αναφοράς διαμορφώνει και καθορίζει το απαιτούμενο σχήμα της τάσης εξόδου (ρεύμα). Υπάρχουν πολλές τροποποιήσεις αυτής της μεθόδου, στην οποία τα σήματα διαμόρφωσης αντιπροσωπεύονται από ειδικές λειτουργίες εκτός από ένα ημιτονοειδές. Οι σημειώσεις της διάλεξης θα καλύψουν πολλά βασικά κυκλώματα που εξηγούν αυτές τις μεθόδους PWM.
Η μέθοδος επιλεκτικής καταστολής υψηλότερων αρμονικών εφαρμόζεται επί του παρόντος με επιτυχία μέσω ελεγκτών μικροεπεξεργαστή που βασίζονται σε λογισμικό. Η διαμόρφωση υστέρησης βασίζεται στις αρχές του ρελέ «ακολουθώντας» ένα σήμα αναφοράς, για παράδειγμα, μια ημιτονοειδή κυματομορφή. Στην απλούστερη τεχνική υλοποίηση, αυτή η μέθοδος συνδυάζει τις αρχές του PWM και του PFM (διαμόρφωση συχνότητας παλμών). Ωστόσο, μέσω ειδικών μέτρων κυκλώματος, είναι δυνατό να σταθεροποιηθεί η συχνότητα διαμόρφωσης ή να περιοριστεί το εύρος της αλλαγής της.
Η μέθοδος διαμόρφωσης διανύσματος χώρου βασίζεται στη μετατροπή ενός συστήματος τριφασικής τάσης σε διφασικό και στη λήψη ενός γενικευμένου διανύσματος χώρου. Η τιμή αυτού του διανύσματος υπολογίζεται σε χρόνους που καθορίζονται από τις θεμελιώδεις και τις διαμορφωτικές συχνότητες. Θεωρείται πολλά υποσχόμενο για τον έλεγχο τριφασικών μετατροπέων, ιδίως όταν χρησιμοποιείται σε ηλεκτροκίνηση. Ταυτόχρονα, είναι από πολλές απόψεις παρόμοιο με το παραδοσιακό PWM ημιτονοειδούς κύματος.
Τα συστήματα ελέγχου που βασίζονται σε PWM επιτρέπουν όχι μόνο να παρέχουν ένα ημιτονοειδές σχήμα των μέσων τιμών της θεμελιώδους αρμονικής τάσης ή ρεύματος, αλλά και να ελέγχουν τις τιμές του πλάτους, της συχνότητας και της φάσης. Δεδομένου ότι σε αυτές τις περιπτώσεις ο μετατροπέας χρησιμοποιεί πλήρως ελεγχόμενους διακόπτες, καθίσταται δυνατή η υλοποίηση της λειτουργίας των μετατροπέων AC (DC) μαζί με το δίκτυο AC και στα τέσσερα τεταρτημόρια και στις δύο καταστάσεις ανόρθωσης και αναστροφής με οποιαδήποτε δεδομένη τιμή του θεμελιώδους συντελεστή ισχύος cosφ σε κυμαίνονται από -1 έως 1. Επιπλέον, με την αύξηση της συχνότητας του φορέα, οι δυνατότητες αναπαραγωγής μετατροπέων ρεύματος και τάσης μιας δεδομένης μορφής στην έξοδο διευρύνονται. Αυτό σας επιτρέπει να δημιουργήσετε ενεργά φίλτρα για να καταστείλετε υψηλότερες αρμονικές.
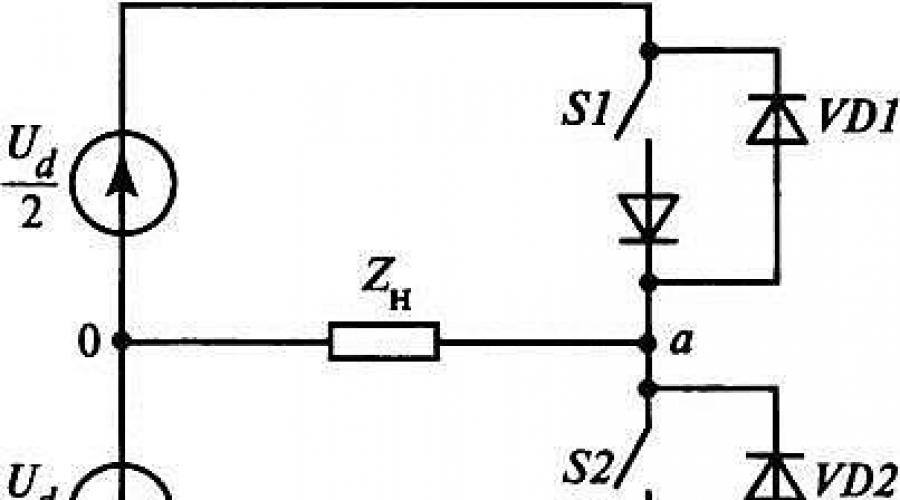
Θα εξετάσουμε τους κύριους ορισμούς που χρησιμοποιούνται στην περαιτέρω παρουσίαση χρησιμοποιώντας το παράδειγμα εφαρμογής της πρώτης μεθόδου σε μονοφασικό κύκλωμα ημιγέφυρας ενός μετατροπέα τάσης (Εικ. 8.1, ένα). Σε αυτό το υπό όρους σχήμα, τα κλειδιά μικρό1 και μικρό2 αντιπροσωπεύονται από πλήρως ελεγχόμενα στοιχεία μεταγωγής, συμπληρωμένα από διόδους συνδεδεμένες σε σειρά και παράλληλα με αυτά. Οι σειριακές δίοδοι αντικατοπτρίζουν τη μονοκατευθυντική αγωγιμότητα των κλειδιών (για παράδειγμα, τρανζίστορ ή θυρίστορ), ενώ οι παράλληλες δίοδοι παρέχουν αγωγιμότητα αντίστροφων ρευμάτων με ενεργό-επαγωγικό φορτίο.
Διαγράμματα αναφοράς, διαμόρφωση uΜ (θ) και φορέας uΤα σήματα H (θ) φαίνονται στο σχ. 8.1, σι. Δημιουργία παλμών ελέγχου κλειδιού μικρό 1 και μικρό 2 πραγματοποιείται σύμφωνα με την ακόλουθη αρχή. Στο uΜ (θ) > uΗ(θ) κλειδί μικρό 1 είναι ενεργοποιημένο, α μικρό 2 απενεργοποιημένο. Στο uΜ(θ)< u H (θ) οι καταστάσεις των κλειδιών αντιστρέφονται: μικρό 2 - ενεργοποιημένο, α μικρό 1 - εκτός. Έτσι, σχηματίζεται μια τάση στην έξοδο του μετατροπέα με τη μορφή δύο πολικών παλμών. Σε πραγματικά κυκλώματα, για να αποκλειστεί η ταυτόχρονη αγωγή πλήκτρων μικρό 1 και μικρό 2, θα πρέπει να παρέχεται μια ορισμένη καθυστέρηση μεταξύ των στιγμών παραγωγής σημάτων για την ενεργοποίηση αυτών των πλήκτρων. Προφανώς, το πλάτος του παλμού εξαρτάται από την αναλογία των εύρους του σήματος uΜ (θ) και uΗ(θ). Η παράμετρος που χαρακτηρίζει αυτόν τον λόγο ονομάζεται δείκτης διαμόρφωσης πλάτους και προσδιορίζεται από τον τύπο (8.1):
, (8.1.)
που UΜ μ και U H m - μέγιστες τιμές του σήματος διαμόρφωσης u M (θ) και σήμα φορέα uΗ(θ), αντίστοιχα.


Ρύζι. 8.1. Μονοφασικός μετατροπέας τάσης ημι-γέφυρας: ένα- σύστημα σι– διαγράμματα τάσης για διαμόρφωση παλμών
Φέρουσα συχνότητα uΤο H (θ) είναι ίσο με τη συχνότητα μεταγωγής φάπλήκτρα H μικρό 1 και μικρό 2 και συνήθως υπερβαίνει σημαντικά τη συχνότητα του σήματος διαμόρφωσης φάΜ. Λόγος συχνότητας φάΧέρι φάΤο M είναι ένας σημαντικός δείκτης της αποτελεσματικότητας της διαδικασίας διαμόρφωσης και ονομάζεται δείκτης διαμόρφωσης συχνότητας, ο οποίος καθορίζεται από τον τύπο (8.2):
Για μικρές αξίες Μ φάσήματα uΜ (θ) και uΤο H (θ) πρέπει να συγχρονίζεται για την αποφυγή ανεπιθύμητων υποαρμονικών. B ως μέγιστη τιμή Μου, που καθορίζει την ανάγκη για συγχρονισμό, έχει οριστεί Μ φά = 21. Προφανώς, με συγχρονισμένα σήματα και ο συντελεστής Μ φάείναι μια σταθερά.
Από το διάγραμμα στο σχ. 8.1 φαίνεται ότι το πλάτος της πρώτης αρμονικής της τάσης εξόδου UΤο am 1, λαμβάνοντας υπόψη το (8.1), μπορεί να εκπροσωπηθεί με την ακόλουθη μορφή (8.3):
![]() (8.3)
(8.3)
Σύμφωνα με το (8.3) για Μ a = 1 το πλάτος της πρώτης αρμονικής της τάσης εξόδου είναι ίσο με το ύψος του ορθογωνίου μισού κύματος Uδ/2. Η χαρακτηριστική εξάρτηση της σχετικής τιμής της πρώτης αρμονικής της τάσης εξόδου από την τιμή του M a φαίνεται στο σχ. 8.2, που δείχνει ότι η αλλαγή Μ a από το 0 έως το 1 είναι γραμμικό και εξαρτάται από το πλάτος Uείμαι 1. Οριακή τιμή ΜΤο α καθορίζεται από την αρχή του τύπου της υπό εξέταση διαμόρφωσης, σύμφωνα με την οποία η μέγιστη τιμή U am 1 περιορίζεται από το ύψος ενός ορθογώνιου ημικύματος ίσο με Uδ/2. Με περαιτέρω αύξηση του συντελεστή Μμια διαμόρφωση οδηγεί σε μη γραμμική αύξηση του πλάτους U am 1 στη μέγιστη τιμή που καθορίζεται από το σχηματισμό τάσης τετραγωνικού κύματος στην έξοδο του μετατροπέα, η οποία στη συνέχεια παραμένει αμετάβλητη.
Η επέκταση μιας ορθογώνιας συνάρτησης σε μια σειρά Fourier δίνει τη μέγιστη τιμή (8,4):
![]() (8.4)
(8.4)
Αυτή η τιμή περιορίζεται από την τιμή του δείκτη Μ a, που ποικίλλει στο εύρος από 0 έως περίπου 3. Είναι προφανές ότι η συνάρτηση στο διάστημα a-b των τιμών από 1 έως 3,2 είναι μη γραμμική (Εικ. 8.2). Ο τρόπος λειτουργίας σε αυτή την ενότητα ονομάζεται υπερδιαμόρφωση.
Εννοια Μ φάκαθορίζεται από την επιλογή της συχνότητας του σήματος φορέα u H (θ) και επηρεάζει σημαντικά τα τεχνικά χαρακτηριστικά του μετατροπέα. Με την αύξηση της συχνότητας, οι απώλειες μεταγωγής στους διακόπτες ισχύος των μετατροπέων αυξάνονται, αλλά ταυτόχρονα βελτιώνεται η φασματική σύνθεση της τάσης εξόδου και η λύση του προβλήματος του φιλτραρίσματος υψηλότερων αρμονικών λόγω της διαδικασίας διαμόρφωσης απλοποιείται. Σημαντικός παράγοντας για την επιλογή της αξίας φά H σε πολλές περιπτώσεις είναι η ανάγκη διασφάλισης της τιμής του στο εύρος συχνοτήτων ήχου άνω των 20 kHz. Κατά την επιλογή φάΤο H πρέπει επίσης να λαμβάνει υπόψη το επίπεδο των τάσεων λειτουργίας του μετατροπέα, την ισχύ του και άλλες παραμέτρους.

Ρύζι. 8.2. Εξάρτηση της σχετικής τιμής του πλάτους της θεμελιώδους αρμονικής της τάσης εξόδου από τον δείκτη διαμόρφωσης πλάτους για ένα μονοφασικό κύκλωμα ημιγέφυρας
Η γενική τάση εδώ είναι μια αύξηση στις τιμές του M φάμετατροπείς χαμηλής ισχύος και χαμηλής τάσης και αντίστροφα. Επιλογή ποιητή Μ φάείναι ένα πρόβλημα βελτιστοποίησης πολλαπλών στόχων.
Διαμόρφωση παλμού με στοχαστική διαδικασία. Η χρήση του PWM στους μετατροπείς συνδέεται με την εμφάνιση υψηλότερων αρμονικών σε διαμορφωμένες τάσεις και ρεύματα. Επιπλέον, στη φασματική σύνθεση αυτών των παραμέτρων, οι πιο σημαντικές αρμονικές εμφανίζονται σε συχνότητες που είναι πολλαπλάσια του δείκτη διαμόρφωσης συχνότητας Μ φάκαι οι αρμονικές ομαδοποιούνται γύρω τους σε πλευρικές συχνότητες με φθίνοντα πλάτη. Οι υψηλότερες αρμονικές μπορούν να προκαλέσουν τα ακόλουθα κύρια προβλήματα:
η εμφάνιση ακουστικού θορύβου.
επιδείνωση της ηλεκτρομαγνητικής συμβατότητας (EMC) με άλλες ηλεκτρικές συσκευές ή συστήματα.
Οι κύριες πηγές ακουστικού θορύβου είναι τα ηλεκτρομαγνητικά εξαρτήματα (τσοκ και μετασχηματιστές), τα οποία επηρεάζονται από το ρεύμα και την τάση που περιέχουν υψηλότερες αρμονικές με συχνότητες στην περιοχή ήχου. Θα πρέπει να σημειωθεί ότι ο θόρυβος μπορεί να εμφανιστεί σε ορισμένες συχνότητες, όπου οι υψηλότερες αρμονικές είναι στο μέγιστο. Παράγοντες που προκαλούν θόρυβο, όπως το φαινόμενο της μαγνητοσυστολής, περιπλέκουν την επίλυση του προβλήματος ΗΜΣ. Τα προβλήματα ΗΜΣ μπορεί να προκύψουν σε ένα ευρύ φάσμα συχνοτήτων, ανάλογα με τη σοβαρότητα του επιπέδου ηλεκτρομαγνητικής παρεμβολής των ηλεκτρικών συσκευών. Παραδοσιακά, χρησιμοποιούνται σχεδιαστικές και τεχνολογικές λύσεις για τη μείωση των επιπέδων θορύβου και παθητικά φίλτρα έχουν χρησιμοποιηθεί για τη διασφάλιση της ηλεκτρομαγνητικής συμβατότητας.
Οι μέθοδοι που σχετίζονται με την αλλαγή της φύσης της φασματικής σύνθεσης των διαμορφωμένων τάσεων και ρευμάτων θεωρούνται ως μια πολλά υποσχόμενη κατεύθυνση για την επίλυση αυτών των προβλημάτων. Η ουσία αυτών των μεθόδων είναι η εξίσωση του φάσματος συχνοτήτων και η μείωση του εύρους των έντονων αρμονικών λόγω της στοχαστικής κατανομής τους σε ένα ευρύ φάσμα συχνοτήτων. Αυτή η τεχνική μερικές φορές ονομάζεται «λεύκανση» του φάσματος συχνοτήτων. Η συγκέντρωση ενέργειας παρεμβολής μειώνεται σε συχνότητες όπου οι αρμονικές μπορεί να είναι στο υψηλότερο σημείο τους. Η εφαρμογή αυτών των μεθόδων δεν σχετίζεται με την επίδραση στα εξαρτήματα του ηλεκτρικού τμήματος των μετατροπέων και στις περισσότερες περιπτώσεις περιορίζεται από εργαλεία λογισμικού με μια μικρή αλλαγή στο σύστημα ελέγχου.
Ας εξετάσουμε εν συντομία τις αρχές εφαρμογής αυτών των μεθόδων. Το PWM βασίζεται στην αλλαγή στον κύκλο λειτουργίας γ= tκαι / Τ n, που t u - διάρκεια παλμού. Τ n- την περίοδο σχηματισμού του. Συνήθως αυτές οι τιμές, καθώς και η θέση του παλμού στο διάστημα της περιόδου Τ nείναι σταθερές σε σταθερή κατάσταση. Τα αποτελέσματα PWM ορίζονται ως ενσωματωμένες μέσες τιμές. Σε αυτή την περίπτωση, οι ντετερμινιστικές τιμές του t και συμπεριλαμβανομένης της θέσης παλμού προκαλούν μια δυσμενή φασματική σύνθεση των διαμορφωμένων παραμέτρων. Εάν στα μεγέθη αυτά δοθεί ένας τυχαίος χαρακτήρας διατηρώντας μια δεδομένη τιμή του γ, τότε οι διεργασίες γίνονται στοχαστικές και η φασματική σύνθεση των διαμορφωμένων παραμέτρων αλλάζει. Για παράδειγμα, ένας τέτοιος τυχαίος χαρακτήρας μπορεί να δοθεί στη θέση της ώθησης tκαι στο διάστημα περιόδου T n ή παρέχουν μια στοχαστική μεταβολή του τελευταίου. Για το σκοπό αυτό, μπορεί να χρησιμοποιηθεί μια γεννήτρια τυχαίων αριθμών, η οποία ενεργεί στην κύρια γεννήτρια συχνότητας διαμόρφωσης φά n =1/Τ n. Ομοίως, μπορείτε να αλλάξετε τη θέση του παλμού στο διάστημα Τ nμε μαθηματική προσδοκία ίση με μηδέν. Η μέση ακέραια τιμή γ πρέπει να παραμείνει στο επίπεδο που έχει ορίσει το σύστημα ελέγχου, με αποτέλεσμα να εξισωθεί η φασματική σύνθεση υψηλότερων αρμονικών στις διαμορφωμένες τάσεις και ρεύματα.
Ερωτήσεις για αυτοέλεγχο
1. Καταγράψτε τις κύριες μεθόδους PWM για την παροχή ημιτονοειδούς ρεύματος ή τάσης.
2. Ποια είναι η διαφορά μεταξύ της μονοπολικής διαμόρφωσης τάσης και της διπολικής;
3. Καταχωρίστε τις κύριες παραμέτρους PWM.
4. Ποιος είναι ο σκοπός της χρήσης PWM με στοχαστικές διαδικασίες;
Η διαμόρφωση πλάτους παλμού (PWM) είναι μια μέθοδος μετατροπής σήματος στην οποία η διάρκεια του παλμού (κύκλος λειτουργίας) αλλάζει, ενώ η συχνότητα παραμένει σταθερή. Στην αγγλική ορολογία, αναφέρεται ως PWM (pulse-width modulation). Σε αυτό το άρθρο, θα καταλάβουμε λεπτομερώς τι είναι το PWM, πού χρησιμοποιείται και πώς λειτουργεί.
Περιοχή εφαρμογής
Με την ανάπτυξη της τεχνολογίας μικροελεγκτών, έχουν ανοίξει νέες ευκαιρίες για το PWM. Αυτή η αρχή έχει γίνει η βάση για ηλεκτρονικές συσκευές που απαιτούν τόσο προσαρμογή των παραμέτρων εξόδου όσο και διατήρησή τους σε ένα δεδομένο επίπεδο. Η μέθοδος διαμόρφωσης πλάτους παλμού χρησιμοποιείται για την αλλαγή της φωτεινότητας του φωτός, της ταχύτητας περιστροφής των κινητήρων, καθώς και για τον έλεγχο του τρανζίστορ ισχύος των τροφοδοτικών παλμικού τύπου (PSU).
Η διαμόρφωση πλάτους παλμού (PW) χρησιμοποιείται ενεργά στην κατασκευή συστημάτων ελέγχου φωτεινότητας LED. Λόγω της χαμηλής αδράνειας, το LED έχει χρόνο να αλλάξει (αναβοσβήνει και σβήνει) σε συχνότητα αρκετών δεκάδων kHz. Η λειτουργία του σε παλμική λειτουργία γίνεται αντιληπτή από το ανθρώπινο μάτι ως μια συνεχής λάμψη. Με τη σειρά του, η φωτεινότητα εξαρτάται από τη διάρκεια του παλμού (η ανοιχτή κατάσταση του LED) κατά τη διάρκεια μιας περιόδου. Εάν ο χρόνος παλμού είναι ίσος με τον χρόνο παύσης, δηλαδή ο κύκλος λειτουργίας είναι 50%, τότε η φωτεινότητα του LED θα είναι το ήμισυ της ονομαστικής τιμής. Με τη διάδοση των λαμπτήρων LED 220V, προέκυψε το ερώτημα της αύξησης της αξιοπιστίας της λειτουργίας τους με ασταθή τάση εισόδου. Η λύση βρέθηκε με τη μορφή ενός γενικού μικροκυκλώματος - ενός οδηγού ισχύος που λειτουργεί με την αρχή της διαμόρφωσης πλάτους παλμού ή παλμικής συχνότητας. Ένα κύκλωμα που βασίζεται σε ένα από αυτά τα προγράμματα οδήγησης περιγράφεται λεπτομερώς.
Η τάση δικτύου που παρέχεται στην είσοδο του μικροκυκλώματος του οδηγού συγκρίνεται συνεχώς με την τάση αναφοράς στο κύκλωμα, σχηματίζοντας ένα σήμα PWM (PFM) στην έξοδο, οι παράμετροι του οποίου ρυθμίζονται από εξωτερικές αντιστάσεις. Ορισμένα μικροκυκλώματα διαθέτουν έξοδο για την παροχή αναλογικού ή ψηφιακού σήματος ελέγχου. Έτσι, η λειτουργία του προγράμματος οδήγησης παλμού μπορεί να ελεγχθεί χρησιμοποιώντας έναν άλλο μετατροπέα SHI. Είναι ενδιαφέρον ότι το LED δεν λαμβάνει παλμούς υψηλής συχνότητας, αλλά ένα ρεύμα που εξομαλύνεται από ένα τσοκ, το οποίο είναι απαραίτητο στοιχείο τέτοιων κυκλωμάτων.
Η μαζική χρήση του PWM αντικατοπτρίζεται σε όλα τα πάνελ LCD με οπίσθιο φωτισμό LED. Δυστυχώς, στις οθόνες LED, οι περισσότεροι μετατροπείς SHI λειτουργούν σε συχνότητα εκατοντάδων Hertz, γεγονός που επηρεάζει αρνητικά την όραση των χρηστών Η/Υ.
Ο μικροελεγκτής Arduino μπορεί επίσης να λειτουργήσει σε λειτουργία ελεγκτή PWM. Για να το κάνετε αυτό, καλέστε τη συνάρτηση AnalogWrite () με τις τιμές μεταξύ 0 και 255 που υποδεικνύονται σε αγκύλες. Το μηδέν αντιστοιχεί σε 0V και 255 έως 5V. Οι ενδιάμεσες τιμές υπολογίζονται αναλογικά.
Η πανταχού παρουσία συσκευών που λειτουργούν με την αρχή PWM επέτρεψε στην ανθρωπότητα να απομακρυνθεί από τα τροφοδοτικά γραμμικού τύπου μετασχηματιστών. Ως αποτέλεσμα, αύξηση της απόδοσης και μείωση του βάρους και του μεγέθους των πηγών ενέργειας κατά πολλές φορές.
Ο ελεγκτής PWM αποτελεί αναπόσπαστο μέρος ενός σύγχρονου τροφοδοτικού μεταγωγής. Ελέγχει τη λειτουργία του τρανζίστορ ισχύος που βρίσκεται στο πρωτεύον κύκλωμα του μετασχηματιστή παλμών. Λόγω της παρουσίας ενός κυκλώματος ανάδρασης, η τάση στην έξοδο PSU παραμένει πάντα σταθερή. Η παραμικρή απόκλιση της τάσης εξόδου μέσω της ανάδρασης καθορίζεται από ένα μικροκύκλωμα, το οποίο διορθώνει αμέσως τον κύκλο λειτουργίας των παλμών ελέγχου. Επιπλέον, ένας σύγχρονος ελεγκτής PWM επιλύει μια σειρά από πρόσθετες εργασίες που βελτιώνουν την αξιοπιστία του τροφοδοτικού:
- παρέχει τη λειτουργία ομαλής εκκίνησης του μετατροπέα.
- περιορίζει το πλάτος και τον κύκλο λειτουργίας των παλμών ελέγχου.
- ελέγχει το επίπεδο τάσης εισόδου.
- προστατεύει από βραχυκύκλωμα και υπερβολική θερμοκρασία του διακόπτη τροφοδοσίας.
- θέτει τη συσκευή σε κατάσταση αναμονής εάν χρειάζεται.
Η αρχή λειτουργίας του ελεγκτή PWM
Η αποστολή του ελεγκτή PWM είναι να ελέγχει τον διακόπτη λειτουργίας αλλάζοντας τους παλμούς ελέγχου. Όταν λειτουργεί στη λειτουργία κλειδιού, το τρανζίστορ βρίσκεται σε μία από τις δύο καταστάσεις (πλήρως ανοιχτό, πλήρως κλειστό). Στην κλειστή κατάσταση, το ρεύμα διαμέσου της διασταύρωσης p-n δεν υπερβαίνει μερικά μΑ, πράγμα που σημαίνει ότι η ισχύς διασποράς τείνει στο μηδέν. Στην ανοιχτή κατάσταση, παρά το υψηλό ρεύμα, η αντίσταση της διασταύρωσης p-n είναι υπερβολικά χαμηλή, γεγονός που οδηγεί επίσης σε ασήμαντες απώλειες θερμότητας. Η μεγαλύτερη ποσότητα θερμότητας απελευθερώνεται τη στιγμή της μετάβασης από τη μια κατάσταση στην άλλη. Αλλά λόγω του μικρού χρόνου της διαδικασίας μετάβασης σε σύγκριση με τη συχνότητα διαμόρφωσης, η απώλεια ισχύος κατά τη μεταγωγή είναι αμελητέα.
Η διαμόρφωση πλάτους παλμού χωρίζεται σε δύο τύπους: αναλογική και ψηφιακή. Καθένας από τους τύπους έχει τα δικά του πλεονεκτήματα και μπορεί να εφαρμοστεί σε κυκλώματα με διαφορετικούς τρόπους.
Αναλογικό PWM
Η αρχή λειτουργίας ενός αναλογικού διαμορφωτή SHI βασίζεται στη σύγκριση δύο σημάτων των οποίων η συχνότητα διαφέρει κατά πολλές τάξεις μεγέθους. Το στοιχείο σύγκρισης είναι ένας λειτουργικός ενισχυτής (συγκριτής). Μια τάση πριονωτή υψηλής σταθερής συχνότητας εφαρμόζεται σε μια από τις εισόδους του και μια τάση διαμόρφωσης χαμηλής συχνότητας με μεταβλητό πλάτος τροφοδοτείται στην άλλη. Ο συγκριτής συγκρίνει και τις δύο τιμές και παράγει ορθογώνιους παλμούς στην έξοδο, η διάρκεια των οποίων καθορίζεται από την τρέχουσα τιμή του σήματος διαμόρφωσης. Σε αυτήν την περίπτωση, η συχνότητα PWM είναι ίση με τη συχνότητα του σήματος του πριονιού.
Ψηφιακό PWM
Η διαμόρφωση πλάτους παλμού στην ψηφιακή ερμηνεία είναι μία από τις πολλές λειτουργίες του μικροελεγκτή (MC). Λειτουργώντας αποκλειστικά με ψηφιακά δεδομένα, το MK μπορεί να παράγει είτε υψηλό (100%) είτε χαμηλό (0%) επίπεδο τάσης στις εξόδους του. Ωστόσο, στις περισσότερες περιπτώσεις, για τον αποτελεσματικό έλεγχο του φορτίου, πρέπει να αλλάξει η τάση στην έξοδο του MK. Για παράδειγμα, ρύθμιση της ταχύτητας περιστροφής του κινητήρα, αλλαγή της φωτεινότητας του LED. Τι πρέπει να κάνετε για να λάβετε οποιαδήποτε τιμή τάσης στην περιοχή από 0 έως 100% στην έξοδο του μικροελεγκτή;
Το πρόβλημα επιλύεται χρησιμοποιώντας τη μέθοδο διαμόρφωσης πλάτους παλμού και χρησιμοποιώντας το φαινόμενο υπερδειγματοληψίας, όταν η καθορισμένη συχνότητα μεταγωγής είναι πολλές φορές υψηλότερη από την απόκριση της ελεγχόμενης συσκευής. Με την αλλαγή του κύκλου λειτουργίας των παλμών, αλλάζει η μέση τιμή της τάσης εξόδου. Κατά κανόνα, η όλη διαδικασία λαμβάνει χώρα σε συχνότητα από δεκάδες έως εκατοντάδες kHz, γεγονός που καθιστά δυνατή την επίτευξη ομαλής προσαρμογής. Τεχνικά, αυτό υλοποιείται χρησιμοποιώντας έναν ελεγκτή PWM - ένα εξειδικευμένο μικροκύκλωμα, το οποίο είναι η «καρδιά» κάθε ψηφιακού συστήματος ελέγχου. Η ενεργή χρήση ελεγκτών που βασίζονται σε PWM οφείλεται στα αναμφισβήτητα πλεονεκτήματά τους:
- υψηλή απόδοση μετατροπής σήματος.
- σταθερότητα εργασίας.
- εξοικονόμηση ενέργειας που καταναλώνεται από το φορτίο.
- χαμηλό κόστος;
- υψηλή αξιοπιστία ολόκληρης της συσκευής.
Υπάρχουν δύο τρόποι για να λάβετε ένα σήμα PWM στις ακίδες του μικροελεγκτή: υλικό και λογισμικό. Κάθε MK έχει ένα ενσωματωμένο χρονόμετρο που είναι σε θέση να παράγει παλμούς PWM σε ορισμένες ακίδες. Έτσι επιτυγχάνεται η υλοποίηση υλικού. Η λήψη σήματος PWM με χρήση εντολών λογισμικού έχει περισσότερες επιλογές όσον αφορά την ανάλυση και σας επιτρέπει να χρησιμοποιείτε περισσότερες ακίδες. Ωστόσο, η μέθοδος λογισμικού οδηγεί σε υψηλή φόρτωση του MK και καταλαμβάνει πολλή μνήμη.
Αξίζει να σημειωθεί ότι στο ψηφιακό PWM ο αριθμός των παλμών ανά περίοδο μπορεί να είναι διαφορετικός και οι ίδιοι οι παλμοί μπορούν να εντοπιστούν σε οποιοδήποτε σημείο της περιόδου. Το επίπεδο σήματος εξόδου καθορίζεται από τη συνολική διάρκεια όλων των παλμών ανά περίοδο. Θα πρέπει να γίνει κατανοητό ότι κάθε πρόσθετος παλμός είναι μια μετάβαση του τρανζίστορ ισχύος από την ανοιχτή κατάσταση στην κλειστή κατάσταση, η οποία οδηγεί σε αύξηση των απωλειών κατά τη μεταγωγή.
Ένα παράδειγμα χρήσης ενός ελεγκτή PWM
Μία από τις επιλογές υλοποίησης για έναν απλό ελεγκτή PWM έχει ήδη περιγραφεί νωρίτερα. Είναι κατασκευασμένο με βάση ένα μικροκύκλωμα και έχει μικρό ιμάντα. Όμως, παρά την απλότητα του κυκλώματος, ο ρυθμιστής έχει ένα αρκετά ευρύ φάσμα εφαρμογών: κυκλώματα ελέγχου για τη φωτεινότητα των LED, λωρίδες LED, ρύθμιση της ταχύτητας περιστροφής των κινητήρων DC.
Διαβάστε επίσης
Με το PWM, το πρόσημο του σήματος αναλογικής μοντελοποίησης b(t) (Σχήμα A) αλλάζει το πλάτος (διάρκεια παλμού (c)) του υποφέροντος με σταθερό πλάτος και ρυθμό επανάληψης.
Το PWM μερικές φορές ονομάζεται DIM διαμόρφωσης μεγάλου παλμού.
Διακρίνετε το PWM ΜΟΝΗΣ και ΔΙΠΛΗΣ ΠΛΕΥΡΗΣ.
Με το μονόπλευρο PWM, η αλλαγή στο πλάτος του παλμού συμβαίνει μόνο λόγω της μετατόπισης της αποκοπής παλμού (PWM-1) (Εικόνα B)
Και με τομή διπλής όψης και το μπροστινό μέρος του παλμού PWM-2 (Εικόνα Δ)
Το πιο ευρέως χρησιμοποιούμενο PWM-1

Και θα υποθέσουμε ότι το σήμα μοντελοποίησης
αλλάζει σύμφωνα με τον αρμονικό νόμο, σύμφωνα με τον οποίο
το πλάτος του παλμού είναι:
Που  - απόκλιση διάρκειας παλμού
- απόκλιση διάρκειας παλμού
Αντικατάσταση αυτής της τιμής  στο προηγούμενο
στο προηγούμενο
έκφραση παίρνουμε το φασματικό σήμα του σήματος PWM.
Είναι πιο βολικό να εκτελείτε έναν διαμορφωτή σήματος PWM σε ολοκληρωμένα κυκλώματα (IC)

Η είσοδος 2 τροφοδοτείται με έναν παλμικό υποφορέα
Είσοδος 5 – αναλογικό σήμα μοντελοποίησης b(t)
Ο αποδιαμορφωτής PWM είναι συνήθως LPF
27. Διαμόρφωση φάσης-παλμού. Διαμορφωτές σήματος PIM.
Με το PIM, σύμφωνα με το νόμο του προσομοιωμένου αναλογικού σήματος b(t), αλλάζει μόνο η χρονική θέση των παλμών βίντεο υποφορέα, ενώ το πλάτος και η διάρκειά τους παραμένουν αμετάβλητα.
Εάν διαφοροποιήσετε το σήμα PWM εγκαίρως, τότε λαμβάνονται θετικοί και αρνητικοί παλμοί.
Ένας θετικός παλμός αντιστοιχεί στην ανερχόμενη ακμή του σήματος PWM και ένας αρνητικός παλμός αντιστοιχεί στην αποκοπή του.
Με μονόδρομο PWM, οι θετικοί παλμοί είναι στάσιμοι και οι αρνητικοί μετατοπίζονται ανάλογα με το σήμα μοντελοποίησης b(t) κατά μήκος του άξονα του χρόνου.
Οι σταθεροί παλμοί μπορούν να εξαλειφθούν με έναν ωμικό ανορθωτή μισού κύματος και οι υπόλοιποι παλμοί είναι σήματα PPM.
Ο διαμορφωτής σήματος PWM στην περίπτωση αυτή αποτελείται από έναν διαμορφωτή PWM στην έξοδο του οποίου είναι συνδεδεμένη μια διαφοροποιητική συσκευή DU και ένας ανορθωτής μισού κύματος OB. (δείτε εικόνα)

Η αναλυτική έκφραση του σήματος PIM έχει τη μορφή:

 - πλάτος παλμού
- πλάτος παλμού
 -λειτουργία που περιγράφει το περίβλημα του παλμού μέτρησης.
-λειτουργία που περιγράφει το περίβλημα του παλμού μέτρησης.
 - παραμόρφωση της χρονικής θέσης του παλμού μέτρησης
- παραμόρφωση της χρονικής θέσης του παλμού μέτρησης
 - την αξία του μεταδιδόμενου μηνύματος τη δεδομένη χρονική στιγμή
- την αξία του μεταδιδόμενου μηνύματος τη δεδομένη χρονική στιγμή 
Το φάσμα συχνοτήτων των σημάτων PIM είναι αναλυτικά δύσκολο να αναπαρασταθεί
Η κατά προσέγγιση τιμή για το πλάτος του εκπεμπόμενου αρμονικού σήματος στο φάσμα PIM είναι:

Που  - συχνότητα μηνυμάτων
- συχνότητα μηνυμάτων
 - διάρκεια παλμού
- διάρκεια παλμού
Το πλάτος του μεταδιδόμενου σήματος στο φάσμα PWM είναι πολύ μικρό (πολύ μικρότερο από ό,τι στα φάσματα AIM και PWM και είναι συνάρτηση της συχνότητας μοντελοποίησης  , δηλ. παραμορφωμένο).
, δηλ. παραμορφωμένο).
Επομένως, η αποδιαμόρφωση των σημάτων PPM με ένα φίλτρο χαμηλής διέλευσης δεν είναι άμεσα δυνατή.
Μετατρέπονται σε σήματα AIM ή PWM.
28. Διαμόρφωση συχνότητας-παλμού. Ανιχνευτές σήματος Chim.
Ο ανιχνευτής μπορεί να κατασκευαστεί σύμφωνα με το σχέδιο
Που φά- φίλτρο καναλιού. JSC- περιοριστής πλάτους. DC-διαφορ. αλυσίδα; DV-ανορθωτής δύο μισών κυμάτων με ενεργό φορτίο. OV- Μονός δονητής ρε-ανιχνευτής με διπλασιασμό τάσης. LPF-φίλτρο χαμηλής διέλευσης.
Η λειτουργία του ανιχνευτή εξηγείται με τη βοήθεια διαγραμμάτων χρονισμού.

Αφού περάσει από τα κυκλώματα στενής ζώνης του καναλιού επικοινωνίας, το σήμα PFM γίνεται παρόμοιο με το αναλογικό σήμα FM. Από το μπλοκ AO, είναι βαθιά περιορισμένο σε πλάτος και στις δύο πλευρές, έτσι ώστε στην έξοδό του να λαμβάνουν χώρα οι ίδιοι ορθογώνιοι παλμοί διαφορετικών ρυθμών επανάληψης και διάρκειας. Στο μπλοκ DC, αυτοί οι παλμοί διαφοροποιούνται χρονικά, με αποτέλεσμα, στην έξοδό του, το UDC (t) να αντιπροσωπεύει μέτωπα και κοψίματα. Οι τελευταίοι είναι πολύ στενοί διπολικοί παλμοί, οι οποίοι μετατρέπονται στο μπλοκ DW σε μονοπολικό Umot(t), διπλασιάζοντας έτσι τον ρυθμό επανάληψης. Στο μπλοκ OB σχηματίζονται πανομοιότυποι ορθογώνιοι παλμοί ίδιας διάρκειας, αλλά διαφορετικών ρυθμών επανάληψης, οι οποίοι τροφοδοτούνται στην είσοδο του μπλοκ D. Σχηματικό διάγραμμα του μπλοκ D:

Στην έξοδο του κυκλώματος, υπάρχει ένα μεταδιδόμενο αναλογικό σήμα Ud(t). Σε ορισμένες περιπτώσεις, το μπλοκ OB εξαιρείται. Η υψηλή σταθερότητα των παραμέτρων αυτού του ανιχνευτή οδήγησε στην ευρεία εφαρμογή του ακόμη και για αναλογικά σήματα FM.
Διαμόρφωση πλάτους παλμού. Περιγραφή. Εφαρμογή. (10+)
Διαμόρφωση πλάτους παλμού
Μία από τις προσεγγίσεις για τη μείωση των απωλειών θέρμανσης των στοιχείων ισχύος των κυκλωμάτων είναι η χρήση τρόπων λειτουργίας μεταγωγής. Σε τέτοιες λειτουργίες, το στοιχείο ισχύος είναι είτε ανοιχτό, τότε υπάρχει πρακτικά μηδενική πτώση τάσης σε αυτό, είτε κλειστό, τότε μηδενικό ρεύμα ρέει μέσα από αυτό. Η ισχύς που διαχέεται είναι ίση με το γινόμενο ρεύματος και τάσης. Περισσότερα για αυτό στον σύνδεσμο. Σε αυτή τη λειτουργία, είναι δυνατό να επιτευχθεί απόδοση μεγαλύτερη από 80%.
Για να λάβετε ένα σήμα του επιθυμητού σχήματος στην έξοδο, ο διακόπτης λειτουργίας ανοίγει για ορισμένο χρόνο ανάλογο με την επιθυμητή τάση εξόδου. Αυτή είναι η διαμόρφωση πλάτους παλμού (PWM, PWM). Περαιτέρω, ένα τέτοιο σήμα, που αποτελείται από παλμούς διαφορετικού πλάτους, εισέρχεται σε ένα φίλτρο που αποτελείται από ένα τσοκ και έναν πυκνωτή. Στην έξοδο του φίλτρου, λαμβάνεται ένα σχεδόν τέλειο σήμα του επιθυμητού σχήματος.
Εφαρμογή διαμόρφωσης πλάτους παλμού (PWM)
Δυστυχώς, λάθη εμφανίζονται περιοδικά σε άρθρα, διορθώνονται, άρθρα συμπληρώνονται, αναπτύσσονται, ετοιμάζονται νέα. Εγγραφείτε στα νέα για να είστε ενημερωμένοι.
Αν κάτι δεν είναι ξεκάθαρο, φροντίστε να ρωτήσετε!
Κάνε μια ερώτηση. Συζήτηση άρθρου. μηνύματα.
Περισσότερα άρθρα
Ισχυρός παλμικός μετασχηματιστής. Υπολογισμός. Υπολογίζω. Σε σύνδεση. Ωχ...
Ηλεκτρονικός υπολογισμός παλμικού μετασχηματιστή ισχύος....
Πώς να μην μπερδεύουμε τα συν και τα πλην; Προστασία αντίστροφης πολικότητας. Σχέδιο...
Κύκλωμα προστασίας αντίστροφης πολικότητας (αντιστροφή πολικότητας) φορτιστών...
Μετατροπέας συντονισμού, μετατροπέας ενίσχυσης τάσης. Η αρχή του r...
Συναρμολόγηση και ρύθμιση του μετατροπέα τάσης ανύψωσης. Περιγραφή της αρχής λειτουργίας...
Ταλαντωτικό κύκλωμα. Σχέδιο. Υπολογισμός. Εφαρμογή. Απήχηση. Ηχηρός...
Υπολογισμός και εφαρμογή ταλαντωτικών κυκλωμάτων. Φαινόμενο συντονισμού. Ακολουθητικός...
Ένας απλός μετατροπέας τάσης προς τα εμπρός παλμού. 5 - 12 β...
Διάγραμμα ενός απλού μετατροπέα τάσης για την τροφοδοσία ενός λειτουργικού ενισχυτή....
Διορθωτής συντελεστή ισχύος. Σχέδιο. Υπολογισμός. Λειτουργική αρχή....
Κύκλωμα διορθωτή συντελεστή ισχύος...
Φτιάξτο μόνος σου bespereboynik. UPS, UPS κάντε το μόνοι σας. Ημιτονοειδής, ημιτονοειδής...
Πώς να φτιάξετε μόνοι σας έναν αδιάλειπτο διακόπτη; Καθαρά ημιτονοειδής τάση εξόδου, με...
Ισχυρός παλμικός μετασχηματιστής, τσοκ. Κούρδισμα. Φτιαχνω, κανω...
Τεχνικές περιέλιξης παλμικού τσοκ / μετασχηματιστή ....
Γιατί τα φώτα σβήνουν τόσο αργά στις κινηματογραφικές αίθουσες;
-Επειδή ο προβολέας αποσυνδέει το βύσμα πολύ αργά.
Εισαγωγή στη διαμόρφωση πλάτους παλμού.
Νωρίτερα, μάθαμε πώς να ελέγχουμε το LED αλλάζοντας την κατάσταση της θύρας GPIO. Μάθαμε πώς να ελέγχουμε τη διάρκεια και τη συχνότητα των παλμών, χάρη στους οποίους πήραμε διάφορα εφέ φωτισμού. Φροντίσαμε ότι αν αλλάξετε την κατάσταση της θύρας με συχνότητα ήχου, μπορείτε να πάρετε διαφορετική
ήχοι, κατακτημένη διαμόρφωση συχνότητας ...
Και τι γίνεται αν αλλάξουμε το επίπεδο της θύρας με μια συχνότητα ήχου, αλλά αντί για ηχείο, συνδέσουμε τον παλιό μας πειραματικό φίλο - ένα LED;
Κάνε ένα πείραμα. Τροποποιήστε το πρόγραμμα blink.c έτσι ώστε το LED να ανάβει και να σβήνει 200 φορές το δευτερόλεπτο, σε συχνότητα 200 Hz. Για να το κάνετε αυτό, απλώς αλλάξτε τις παραμέτρους της συνάρτησης delay(). Για να μάθετε ποιες καθυστερήσεις πρέπει να εισαγάγετε, αρκεί να υπολογίσετε την περίοδο ταλάντωσης T. T=1/f. Και από τότε Το f είναι ίσο με 200 Hz, τότε T \u003d 1/200 \u003d 0,005 δευτερόλεπτα ή 5 χιλιοστά του δευτερολέπτου. Για αυτά τα 5 χιλιοστά του δευτερολέπτου, πρέπει να έχουμε χρόνο να ανάψουμε το LED και να το σβήσουμε 1 φορά. Δεδομένου ότι το 5 με το 2 δεν διαιρείται, ας πάρουμε τον χρόνο λάμψης των LED 2 ms και τον χρόνο μη ανάμματος 3 ms. 2+3=5, δηλ. η πλήρης περίοδος μιας ταλάντωσης θα παραμείνει 5ms. Τώρα ας αλλάξουμε το πρόγραμμα: αντικαταστήστε την καθυστέρηση(500) με την καθυστέρηση(2) και την καθυστέρηση(3) για ενεργοποίηση και απενεργοποίηση
LED αντίστοιχα.
Ας μεταγλωττίσουμε το πρόγραμμα και ας το τρέξουμε. Εάν εξακολουθείτε να έχετε εγκατεστημένο ένα ηχείο στο κύκλωμα, θα ακούσετε έναν χαμηλό ήχο και εάν αντικαταστήσετε το ηχείο με ένα LED, θα δείτε ένα LED συνεχώς αναμμένο. Στην πραγματικότητα, το LED αναβοσβήνει φυσικά, αλλά το κάνει τόσο γρήγορα που το μάτι δεν το αντιλαμβάνεται πλέον αυτό το αναβοσβήσιμο και αντιλαμβάνεται
είναι σαν μια συνεχής λάμψη. Αλλά η δίοδος δεν φαίνεται να λάμπει τόσο έντονα όσο κάποτε μαζί μας. Για σύγκριση, μπορείτε να εκτελέσετε το πρώτο μας πρόγραμμα, όπου το LED ήταν συνεχώς αναμμένο, και να συγκρίνετε τη φωτεινότητα του LED και στις δύο περιπτώσεις. Ας δούμε γιατί συμβαίνει αυτό και πώς μπορεί να χρησιμοποιηθεί.
Θυμάστε, στο πρώτο κιόλας μέρος, υπολογίσαμε την αντίσταση περιορισμού ρεύματος για την τροφοδοσία του LED; Γνωρίζουμε ότι το LED έχει ένα ρεύμα λειτουργίας στο οποίο ανάβει πιο έντονα. Εάν αυτό το ρεύμα μειωθεί, τότε θα μειωθεί και η φωτεινότητα του LED. Και όταν αρχίσουμε να ανάβουμε και να σβήνουμε γρήγορα το LED, τότε
η φωτεινότητά του εξαρτάται από το μέσο ρεύμα (Iср) για την περίοδο ταλάντωσης. Για ένα σήμα παλμού (σχήματος P) που παράγουμε στην έξοδο της θύρας GPIO, το μέσο ρεύμα θα είναι ανάλογο με την αναλογία t1 προς t2. Δηλαδή: Iср=In x t1/t2, όπου In είναι το ονομαστικό ρεύμα του LED, το οποίο ρυθμίσαμε στα 10mA χάρη στην αντίσταση. Στο ονομαστικό ρεύμα, το LED ανάβει πιο έντονα. Και στην περίπτωσή μας, Iср = 10 x 2/3 = 6,7 mA. Βλέπουμε ότι το ρεύμα έχει μειωθεί, έτσι το LED άρχισε να καίει λιγότερο έντονα. Σε αυτόν τον τύπο, ονομάζεται ο λόγος t1/t2 κύκλος καθηκόντωνΡΕ.
Όσο μεγαλύτερος είναι αυτός ο συντελεστής, τόσο μεγαλύτερη είναι η μέση τιμή ρεύματος. Μπορούμε να αλλάξουμε αυτή την αναλογία από 0 σε 1 ή από 0% σε 100%. Έτσι, μπορούμε να αλλάξουμε το μέσο ρεύμα εντός αυτών των ορίων. Αποδεικνύεται ότι με αυτόν τον τρόπο μπορούμε να ρυθμίσουμε τη φωτεινότητα του LED από τη μέγιστη σε εντελώς απενεργοποιημένη! Και παρόλο που η τάση στην έξοδο της θύρας μας μπορεί ακόμα να είναι μόνο +3,3V ή 0V, το ρεύμα στο κύκλωμά μας μπορεί να αλλάξει. Και αλλάζοντας αυτό το ρεύμα, μπορούμε εύκολα να ελέγξουμε τη Malinka μας. Αυτό το είδος ελέγχου ονομάζεται Διαμόρφωση πλάτους παλμού, ή απλά PWM. Στα αγγλικά ακούγεται σαν PWM, ή Π διαμόρφωση πλάτους παλμού. Το PWM είναι ένα παλμικό σήμα σταθερής συχνότητας με μεταβλητό κύκλο λειτουργίας. Χρησιμοποιείται επίσης ένας τέτοιος ορισμός ως παλμικό σήμα σταθερής συχνότητας με μεταβλητό κύκλο λειτουργίας. Ο κύκλος λειτουργίας S είναι το αντίστροφο του κύκλου λειτουργίας και χαρακτηρίζει τον λόγο της περιόδου παλμού T προς τη διάρκειά της t1.
S=T/t1=1/D.
Λοιπόν, για να εμπεδώσουμε τις γνώσεις μας, μένει να γράψουμε ένα πρόγραμμα που θα ανάβει και θα σβήνει ομαλά το LED μας. Η διαδικασία αλλαγής της φωτεινότητας της λάμψης ονομάζεται θαμπώνουν.
Το πήρα έτσι:
dimmer.γ
// Το πρόγραμμα αλλάζει ομαλά τη φωτεινότητα του LED
// LED συνδεδεμένο στη θύρα P1_03#include
int main()
{
εάν (!bcm2835_init()) επιστρέψει 1;
Bcm2835_gpio_fsel(PIN,BCM2835_GPIO_FSEL_OUTP);
//Ρυθμίστε τη θύρα P1_03 για έξοδο χωρίς υπογραφή int t_on, t_off;
// t_on διάρκεια της κατάστασης ενεργοποίησης = t1, και t_off- της κατάστασης off = t2
Int d = 100, i, j, flag=0; // d- κύκλος λειτουργίας σε ποσοστά, i και j, βοηθητικές μεταβλητές για την οργάνωση κύκλων, σημαία-αν =0 το LED σβήνει, εάν =1 ανάβει
int a=10; // αριθμός πλήρων κύκλων εργασίας
ενώ (α)
{
για (j=100; j!=0; j--) //αλλαγή του συντελεστή πλήρωσης από 100% σε 0%
{
t_on=50*d; // βρείτε t1
t_off=50*(100-d); // βρείτε t2
αν (σημαία==0) d=d-1; // εάν το LED σβήνει, μειώστε τον κύκλο λειτουργίας
αν (σημαία==1) d=d+1; // αν ανάψει η λυχνία LED, αυξήστε τον κύκλο λειτουργίας
Για (i=10; i!=0; i--) //μεταφορά 10 παλμών στο LED με υπολογισμένες παραμέτρους t1 και t2
{
bcm2835_gpio_write(PIN, LOW);
delayMicroseconds(t_on);
bcm2835_gpio_write(PIN, HIGH);
delayMicroseconds(t_off);
}
Αν (d==0) flag=1; // εάν το LED είναι σβηστό, αρχίστε να το ανάβετε
εάν (d==100) flag=0; // εάν το LED έχει φτάσει στη μέγιστη λάμψη, αρχίζουμε να το σβήνουμε
}
ΕΝΑ--;
}
return(!bcm2835_close()); // Έξοδος από το πρόγραμμα
}
Αποθηκεύουμε το πρόγραμμα με το όνομα dimmer.c, μεταγλωττίζουμε και εκτελούμε.
Όπως μπορείτε να δείτε, τώρα το LED μας σβήνει σιγά σιγά και σιγά σιγά ανάβει. Έτσι λειτουργεί το PWM. Η διαμόρφωση πλάτους παλμού χρησιμοποιείται σε πολλές περιοχές. Αυτό περιλαμβάνει τον έλεγχο της φωτεινότητας των λαμπτήρων και των LED, τον έλεγχο των σερβομηχανισμών, τη ρύθμιση της τάσης σε τροφοδοτικά μεταγωγής (τα οποία, για παράδειγμα, βρίσκονται στον υπολογιστή σας), σε μετατροπείς ψηφιακού σε αναλογικό και αναλογικό σε ψηφιακό κ.λπ. Παρεμπιπτόντως, αν επιστρέψουμε στο κύκλωμα ηχείων μας, τότε με τη βοήθεια του PWM μπορείτε να ελέγξετε την ένταση του σήματος και αλλάζοντας τη συχνότητα, τον τόνο του.
Θυμάστε το παλιό ανέκδοτο από τον πρόλογο σε αυτό το μέρος, σχετικά με τον προβολέα που τραβούσε αργά το φις από την πρίζα; Τώρα ξέρουμε ότι αυτός ο προβολέας, για να σβήσει ομαλά το φως, αντίθετα, εισάγει και βγάλει πολύ γρήγορα το φις από την πρίζα.
Εδώ θα τελειώσουμε αυτό το μάθημα. Μένει μόνο να προσθέσουμε ότι το PWM χρησιμοποιείται τόσο συχνά σε διάφορες εφαρμογές που οι κατασκευαστές εξοπλισμού επεξεργαστών συχνά δημιουργούν έναν ελεγκτή PWM απευθείας στον επεξεργαστή. Εκείνοι. Ρυθμίζετε τις παραμέτρους του σήματος που χρειάζεστε στον επεξεργαστή και ο ίδιος ο επεξεργαστής, χωρίς τη βοήθειά σας, εκδίδει το σήμα που χρειάζεστε. Ταυτόχρονα, χωρίς να δαπανηθούν πόροι λογισμικού για τη δημιουργία αυτού του σήματος. Το Bcm2835 έχει επίσης ενσωματωμένο PWM υλικού. Και αυτό το PWM είναι ένα εναλλακτικό χαρακτηριστικό της θύρας GPIO 18 ή P1-12. Για να χρησιμοποιήσουμε PWM υλικού, πρέπει να θέσουμε τη θύρα P1-12 σε λειτουργία ALT5 και να ορίσουμε τις παραμέτρους του επεξεργαστή. Αλλά αυτή είναι μια εντελώς διαφορετική ιστορία...