دارة طنين بدلاً من PWM. تعديل عرض النبض ، PWM ، PWM ، تحكم ، تنظيم ، منظم ، معدل
اقرأ أيضا
8. تعديل عرض النبض في المحولات
8.1 معلومات عامة
تمت مناقشة مبادئ التحكم في النبض والتعديل في الفصل. 4 في مثال أبسط دائرة منظم تيار مستمر. في الوقت نفسه ، يتم تقديم تعريفات للأنواع الرئيسية لتعديل النبضة المستخدمة في نظرية أنظمة النبضات الخطية ، والتي تتوافق مع ممارسة التحكم في محولات التيار المستمر النبضية.
ومع ذلك ، فإن تعديل عرض النبضة للجهود أو التيارات في محولات التيار المتردد له تعريف مختلف قليلاً في إلكترونيات الطاقة ، مع مراعاة ميزات PWM عند حل مشاكل تحويل الكهرباء إلى تيار متردد. كما هو محدد في IEC 551-16-30 ، يشير تعديل عرض النبضة إلى التحكم في النبضات التي يتم فيها تعديل عرض أو تردد النبضات ، أو كليهما ، خلال فترة من التردد الأساسي من أجل إنشاء شكل معين لشكل موجة الجهد الناتج . في معظم الحالات ، يتم تنفيذ PWM من أجل ضمان جهد أو تيار جيبي ، أي لتقليل مستوى التوافقيات الأعلى بالنسبة إلى التوافقيات الأساسية (الأولى) ، ويسمى الجيبية. هناك الطرق الرئيسية التالية لضمان الجيوب الأنفية: التناظرية PWM وتعديلاتها ؛ قمع انتقائي (انتقائي) للتوافقيات الأعلى ؛ التباطؤ أو تعديل دلتا ؛
تعديل ناقلات الفضاء.
البديل الكلاسيكي لتنظيم PWM الجيبية التناظرية هو تغيير عرض النبضات التي تشكل جهد الخرج (التيار) من خلال مقارنة إشارة الجهد لشكل معين ، يسمى مرجع أو مرجع ، بإشارة جهد مثلثة ذات قيمة أعلى التردد ويسمى إشارة الناقل. يتم تعديل الإشارة المرجعية وتحدد الشكل المطلوب لجهد الخرج (التيار). هناك العديد من التعديلات على هذه الطريقة ، حيث يتم تمثيل إشارات التعديل بوظائف خاصة غير الجيوب الأنفية. ستغطي ملاحظات المحاضرة عدة دوائر أساسية تشرح طرق PWM هذه.
يتم حاليًا تنفيذ طريقة القمع الانتقائي للتوافقيات العليا بنجاح عن طريق وحدات تحكم المعالجات الدقيقة القائمة على البرامج. يعتمد تعديل التخلفية على مبادئ الترحيل "بعد" إشارة مرجعية ، على سبيل المثال ، شكل موجة جيبية. في أبسط تطبيق تقني ، تجمع هذه الطريقة بين مبادئ PWM و PFM (تعديل تردد النبضة). ومع ذلك ، من خلال تدابير الدوائر الخاصة ، من الممكن تثبيت تردد التعديل أو الحد من مدى تغيره.
تعتمد طريقة تعديل متجه الفضاء على تحويل نظام جهد ثلاثي الطور إلى مرحلتين واحد والحصول على متجه فضاء عام. يتم حساب قيمة هذا المتجه في أوقات تحددها الترددات الأساسية والمتغيرة. يعتبر واعدًا جدًا للتحكم في العاكسات ثلاثية الطور ، على وجه الخصوص ، عند استخدامه في محرك كهربائي. في الوقت نفسه ، يشبه من نواح كثيرة PWM موجة جيبية تقليدية.
لا تسمح أنظمة التحكم القائمة على PWM فقط بتوفير شكل جيبي للقيم المتوسطة للجهد أو التوافقي الأساسي الحالي ، ولكن أيضًا للتحكم في قيم اتساعها وترددها وطورها. نظرًا لأن المحول في هذه الحالات يستخدم مفاتيح يتم التحكم فيها بالكامل ، يصبح من الممكن تنفيذ تشغيل محولات التيار المتردد (DC) جنبًا إلى جنب مع شبكة التيار المتردد في الأرباع الأربعة في كل من أوضاع التصحيح والانعكاس مع أي قيمة معينة لعامل القدرة الأساسي cosφ في تتراوح من -1 إلى 1. علاوة على ذلك ، مع زيادة تردد الموجة الحاملة ، تتوسع إمكانيات إعادة إنتاج محولات التيار والجهد في شكل معين عند الخرج. هذا يسمح لك بإنشاء مرشحات نشطة لقمع التوافقيات الأعلى.
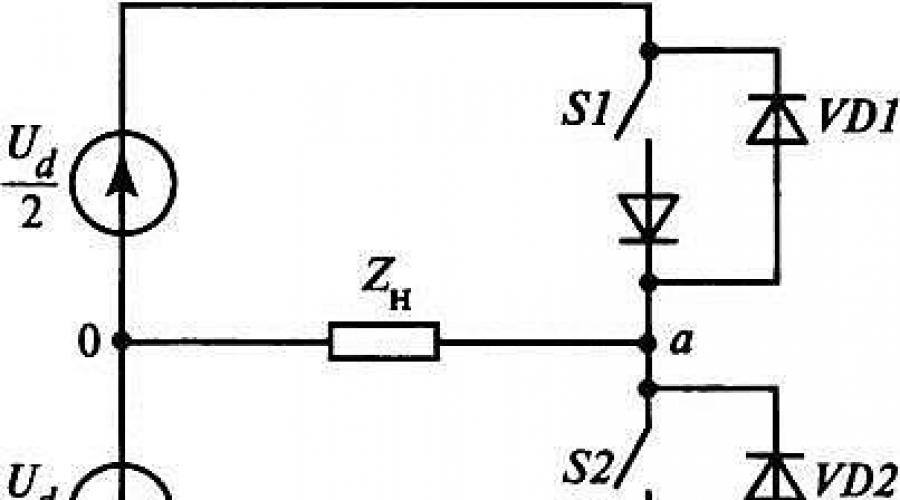
سننظر في التعريفات الرئيسية المستخدمة في العرض التقديمي الإضافي باستخدام مثال تطبيق الطريقة الأولى في دائرة نصف جسر أحادية الطور لعاكس الجهد (الشكل 8.1 ، أ). في هذا المخطط الشرطي ، المفاتيح س1 و س2 يتم تمثيلها بواسطة عناصر تحويل يتم التحكم فيها بالكامل ، مدعومة بصمامات ثنائية متصلة في سلسلة وبالتوازي معها. تعكس الثنائيات التسلسلية التوصيل أحادي الاتجاه للمفاتيح (على سبيل المثال ، الترانزستورات أو الثايرستور) ، بينما توفر الثنائيات المتوازية التوصيل للتيارات العكسية بحمل استقرائي نشط.
مخططات مرجعية معدلة ش M (θ) والناقل شتظهر إشارات H (θ) في الشكل. 8.1 ، ب. مفتاح توليد نبض التحكم س 1 و س 2 وفقًا للمبدأ التالي. في شم (θ)> شمفتاح H (θ) س 1 قيد التشغيل ، أ س 2 مغلق. في شم (θ)< ش H (θ) يتم عكس حالات المفاتيح: س 2 - تمكين ، أ س 1 - إيقاف. وهكذا ، يتشكل جهد عند خرج العاكس على شكل نبضتين قطبيتين. في الدوائر الحقيقية ، لاستبعاد التوصيل المتزامن للمفاتيح س 1 و س 2 ، يجب توفير مهلة معينة بين لحظات توليد الإشارات لتشغيل هذه المفاتيح. من الواضح أن عرض النبضة يعتمد على نسبة اتساع الإشارة شم (θ) و شح (θ). يُطلق على المعلمة التي تميز هذه النسبة اسم مؤشر تعديل السعة ويتم تحديدها بواسطة الصيغة (8.1):
, (8.1.)
أين يوم م و يو H m - القيم القصوى لإشارة التعديل ش M (θ) وإشارة الناقل شح (θ) ، على التوالي.


أرز. 8.1 عاكس الجهد شبه الجسر أحادي الطور: أ- مخطط؛ ب- مخططات الجهد لتعديل النبض
تردد الناقل ش H (θ) يساوي تردد التبديل Fمفاتيح H. س 1 و س 2 وعادة ما يتجاوز بشكل كبير تردد إشارة التعديل Fم. نسبة التردد Fيُسلِّم F M هو مؤشر مهم لكفاءة عملية التشكيل ويسمى مؤشر تعديل التردد ، والذي تحدده الصيغة (8.2):
للقيم الصغيرة م Fإشارات شم (θ) و شيجب مزامنة H (θ) لتجنب التوافقيات الفرعية غير المرغوب فيها. B كقيمة قصوى لي، الذي يحدد الحاجة إلى التزامن ، تم تعيينه م F = 21. من الواضح ، مع الإشارات المتزامنة والمعامل م Fثابت.
من الرسم البياني في الشكل. 8.1 يمكن ملاحظة أن سعة التوافقي الأول لجهد الخرج يوصباحا 1 ، مع مراعاة (8.1) ، يمكن تمثيله بالشكل التالي (8.3):
![]() (8.3)
(8.3)
بحسب (8.3) لـ مأ = 1 سعة التوافقي الأول لجهد الخرج تساوي ارتفاع مستطيل نصف الموجة يود / 2. يظهر في الشكل الاعتماد المميز للقيمة النسبية للتوافقي الأول لجهد الخرج على قيمة M a. 8.2 مما يدل على أن التغيير م a من 0 إلى 1 خطي ويعتمد على السعة يوصباحا 1. قيمة الحد ميتم تحديد a من خلال مبدأ نوع التعديل قيد النظر ، والذي بموجبه يتم تحديد القيمة القصوى يوأنا 1 محدود بارتفاع نصف موجة مستطيلة تساوي يود / 2. مع زيادة أخرى في المعامل ميؤدي التعديل إلى زيادة غير خطية في السعة يوأنا 1 إلى القيمة القصوى التي يحددها تكوين جهد الموجة المربعة عند خرج العاكس ، والذي يظل بعد ذلك دون تغيير.
يعطي تمديد دالة مستطيلة في سلسلة فورييه القيمة القصوى (8.4):
![]() (8.4)
(8.4)
هذه القيمة محدودة بقيمة المؤشر مأ ، تتغير في المدى من 0 إلى حوالي 3. ومن الواضح أن الوظيفة على الفاصل أ-ب للقيم من 1 إلى 3.2 هي وظيفة غير خطية (الشكل 8.2). يسمى أسلوب التشغيل في هذا القسم بالتعديل الزائد.
المعنى م Fيحددها اختيار تردد إشارة الموجة الحاملة ش H (θ) ويؤثر بشكل كبير على الخصائص التقنية للمحول. مع زيادة التردد ، تزداد خسائر التبديل في مفاتيح الطاقة للمحولات ، ولكن في نفس الوقت ، يتحسن التكوين الطيفي لجهد الخرج ويتم تبسيط حل مشكلة تصفية التوافقيات الأعلى بسبب عملية التعديل. عامل مهم في اختيار القيمة F H في كثير من الحالات هي الحاجة إلى ضمان قيمتها في نطاق تردد الصوت الذي يزيد عن 20 كيلو هرتز. عند الاختيار Fيجب أن تأخذ H أيضًا في الاعتبار مستوى الفولتية التشغيلية للمحول وقوته والمعلمات الأخرى.

أرز. 8.2 الاعتماد على القيمة النسبية لسعة التوافقي الأساسي لجهد الخرج على مؤشر تعديل السعة لدائرة نصف جسر أحادية الطور
الاتجاه العام هنا هو زيادة في قيم M. Fمحولات الطاقة المنخفضة والجهد المنخفض والعكس صحيح. اختيار الشاعر م Fهي مشكلة تحسين متعددة الأهداف.
تعديل النبض مع عملية عشوائية. يرتبط استخدام PWM في المحولات بظهور التوافقيات الأعلى في الفولتية والتيارات المعدلة. علاوة على ذلك ، في التركيب الطيفي لهذه المعلمات ، تحدث التوافقيات الأكثر أهمية عند الترددات التي تعد مضاعفات دليل تعديل التردد م Fوالتوافقيات مجمعة حولها في ترددات جانبية ذات اتساع متناقص. التوافقيات الأعلى يمكن أن تؤدي إلى المشاكل الرئيسية التالية:
حدوث ضوضاء صوتية
تدهور التوافق الكهرومغناطيسي (EMC) مع الأجهزة أو الأنظمة الكهربائية الأخرى.
المصادر الرئيسية للضوضاء الصوتية هي المكونات الكهرومغناطيسية (الإختناقات والمحولات) ، والتي تتأثر بالتيار والجهد الذي يحتوي على توافقيات أعلى مع ترددات في النطاق الصوتي. وتجدر الإشارة إلى أن الضوضاء يمكن أن تحدث عند ترددات معينة ، حيث تكون التوافقيات الأعلى في أقصى حد لها. العوامل التي تسبب الضوضاء ، مثل ظاهرة التضيق المغناطيسي ، تعقد حل مشكلة التوافق الكهرومغناطيسي. يمكن أن تحدث مشكلات التوافق الكهرومغناطيسي على نطاق واسع من الترددات ، اعتمادًا على شدة مستوى التداخل الكهرومغناطيسي للأجهزة الكهربائية. تقليديا ، تم استخدام التصميم والحلول التكنولوجية لتقليل مستويات الضوضاء ، واستخدمت المرشحات السلبية لضمان التوافق الكهرومغناطيسي.
تعتبر الطرق المرتبطة بتغيير طبيعة التركيب الطيفي للجهود والتيارات المعدلة بمثابة اتجاه واعد لحل هذه المشكلات. يتمثل جوهر هذه الطرق في معادلة طيف التردد وتقليل اتساع التوافقيات الواضحة بسبب توزيعها العشوائي على مدى تردد واسع. تسمى هذه التقنية أحيانًا "تلطيخ" الطيف الترددي. ينخفض تركيز طاقة التداخل عند الترددات حيث يمكن أن تكون التوافقيات في أعلى مستوياتها. لا يرتبط تنفيذ هذه الأساليب بالتأثير على مكونات جزء الطاقة للمحولات ، وفي معظم الحالات يكون مقيدًا بأدوات برمجية مع تغيير طفيف في نظام التحكم.
دعونا ننظر بإيجاز في مبادئ تنفيذ هذه الأساليب. يعتمد PWM على التغيير في دورة العمل γ = رو / تي ن، أين رش - مدة النبض تي ن- فترة تشكيلها. عادة هذه القيم وكذلك موضع النبض في الفترة الزمنية تي نثابتة في حالة مستقرة. يتم تعريف نتائج PWM على أنها قيم متوسطة متكاملة. في هذه الحالة ، تتسبب القيم الحتمية لـ t وتتضمن موضع النبضة في تكوين طيفي غير مواتٍ للمعلمات المشكلة. إذا أعطيت هذه الكميات طابعًا عشوائيًا مع الحفاظ على قيمة معينة لـ ، فإن العمليات تصبح عشوائية ويتغير التركيب الطيفي للمعلمات المعدلة. على سبيل المثال ، يمكن إعطاء مثل هذا الحرف العشوائي لموضع الدافع روفي الفترة الزمنية T n أو توفير تغيير عشوائي لهذا الأخير. لهذا الغرض ، يمكن استخدام مولد رقم عشوائي ، والذي يعمل على مولد تردد التعديل الرئيسي F ن =1/تي ن. وبالمثل ، يمكنك تغيير موضع النبض في الفترة الزمنية تي نمع توقع رياضي يساوي الصفر. يجب أن يظل متوسط القيمة المتكاملة γ عند المستوى الذي حدده نظام التحكم ، ونتيجة لذلك سيتم معادلة التكوين الطيفي للتوافقيات الأعلى في الفولتية والتيارات المعدلة.
أسئلة لضبط النفس
1. ضع قائمة بأساليب PWM الرئيسية لتوفير تيار أو جهد جيبي.
2. ما هو الفرق بين تعديل الجهد أحادي القطب وثنائي القطب؟
3. قائمة المعلمات الرئيسية PWM.
4. ما هو الغرض من استخدام PWM مع العمليات العشوائية؟
تعديل عرض النبضة (PWM) هو طريقة لتحويل الإشارة تتغير فيها مدة النبضة (دورة العمل) ، بينما يظل التردد ثابتًا. في المصطلحات الإنجليزية ، يشار إليها باسم PWM (تعديل عرض النبضة). في هذه المقالة ، سوف نفهم بالتفصيل ماهية PWM ، وأين يتم استخدامها وكيف تعمل.
منطقة التطبيق
مع تطور تقنية الميكروكونترولر ، فتحت فرص جديدة لـ PWM. أصبح هذا المبدأ أساسًا للأجهزة الإلكترونية التي تتطلب تعديل معلمات الإخراج والحفاظ عليها عند مستوى معين. تُستخدم طريقة تعديل عرض النبضة لتغيير سطوع الضوء ، وسرعة دوران المحركات ، وكذلك للتحكم في ترانزستور الطاقة لمصادر الطاقة من النوع النبضي (PSU).
يتم استخدام تعديل عرض النبضة (PW) بنشاط في بناء أنظمة التحكم في سطوع LED. بسبب القصور الذاتي المنخفض ، فإن LED لديه الوقت للتبديل (الفلاش والخروج) بتردد عدة عشرات من كيلوهرتز. تدرك العين البشرية عملها في الوضع النبضي كتوهج مستمر. في المقابل ، يعتمد السطوع على مدة النبضة (الحالة المفتوحة لمصباح LED) خلال فترة واحدة. إذا كان وقت النبض مساويًا لوقت الإيقاف المؤقت ، أي أن دورة العمل تكون 50٪ ، فإن سطوع مؤشر LED سيكون نصف القيمة الاسمية. مع تعميم مصابيح LED 220 فولت ، نشأ سؤال حول زيادة موثوقية تشغيلها بجهد دخل غير مستقر. تم العثور على الحل في شكل دائرة كهربائية عالمية - محرك طاقة يعمل على مبدأ عرض النبضة أو تعديل تردد النبض. يتم وصف الدائرة المستندة إلى أحد برامج التشغيل هذه بالتفصيل.
تتم مقارنة جهد التيار الكهربائي الموفر لمدخلات الدائرة المصغرة للسائق باستمرار مع الجهد المرجعي داخل الدائرة ، مما يشكل إشارة PWM (PFM) عند الخرج ، والتي يتم تعيين معلماتها بواسطة مقاومات خارجية. تحتوي بعض الدوائر الدقيقة على خرج لتزويد إشارة تحكم تمثيلية أو رقمية. وبالتالي ، يمكن التحكم في تشغيل المحرك النبضي باستخدام محول SHI آخر. ومن المثير للاهتمام ، أن LED لا يتلقى نبضات عالية التردد ، بل تيار يتم تنعيمه بواسطة خنق ، وهو عنصر لا غنى عنه في هذه الدوائر.
ينعكس الاستخدام المكثف لـ PWM في جميع لوحات LCD المزودة بإضاءة خلفية LED. لسوء الحظ ، في شاشات LED ، تعمل معظم محولات SHI بتردد مئات من هيرتز ، مما يؤثر سلبًا على رؤية مستخدمي الكمبيوتر.
يمكن أن يعمل متحكم Arduino أيضًا في وضع تحكم PWM. للقيام بذلك ، اتصل بوظيفة AnalogWrite () مع القيم الواقعة بين 0 و 255 المشار إليها بين قوسين. الصفر يتوافق مع 0V ، و 255 إلى 5V. يتم حساب القيم الوسيطة بشكل متناسب.
سمح انتشار الأجهزة التي تعمل على مبدأ PWM للبشرية بالابتعاد عن مصادر طاقة المحولات من النوع الخطي. ونتيجة لذلك ، زيادة في الكفاءة وانخفاض في وزن وحجم مصادر الطاقة عدة مرات.
تعد وحدة التحكم PWM جزءًا لا يتجزأ من مصدر طاقة التحويل الحديث. يتحكم في تشغيل ترانزستور الطاقة الموجود في الدائرة الأولية لمحول النبض. نظرًا لوجود دائرة تغذية مرتدة ، يظل الجهد عند خرج PSU مستقرًا دائمًا. يتم إصلاح أدنى انحراف لجهد الخرج من خلال التغذية المرتدة بواسطة دائرة كهربائية دقيقة ، والتي تقوم على الفور بتصحيح دورة عمل نبضات التحكم. بالإضافة إلى ذلك ، تعمل وحدة التحكم الحديثة في PWM على حل عدد من المهام الإضافية التي تعمل على تحسين موثوقية مصدر الطاقة:
- يوفر وضع البداية الناعمة للمحول ؛
- يحد من السعة ودورة العمل لنبضات التحكم ؛
- يتحكم في مستوى جهد الإدخال ؛
- يحمي من ماس كهربائى ودرجة الحرارة الزائدة لمفتاح الطاقة ؛
- يضع الجهاز في وضع الاستعداد إذا لزم الأمر.
مبدأ تشغيل وحدة تحكم PWM
تتمثل مهمة وحدة التحكم في PWM في التحكم في مفتاح الطاقة عن طريق تغيير نبضات التحكم. عند التشغيل في وضع المفتاح ، يكون الترانزستور في إحدى حالتين (مفتوح بالكامل ، مغلق تمامًا). في الحالة المغلقة ، لا يتجاوز التيار عبر تقاطع pn بضعة μA ، مما يعني أن قوة التبديد تميل إلى الصفر. في الحالة المفتوحة ، على الرغم من التيار العالي ، تكون مقاومة تقاطع pn منخفضة بشكل مفرط ، مما يؤدي أيضًا إلى فقد حراري ضئيل. يتم إطلاق أكبر قدر من الحرارة في لحظة الانتقال من حالة إلى أخرى. ولكن نظرًا لقصر الوقت الذي تستغرقه عملية الانتقال مقارنةً بتردد التعديل ، فإن فقد الطاقة أثناء التبديل لا يكاد يذكر.
ينقسم تعديل عرض النبضة إلى نوعين: تناظري ورقمي. كل نوع له مميزاته الخاصة ويمكن تنفيذه في الدوائر بطرق مختلفة.
التناظرية PWM
يعتمد مبدأ تشغيل مُعدِّل SHI التناظري على مقارنة إشارتين يختلف ترددهما بعدة أوامر من حيث الحجم. عنصر المقارنة هو مكبر تشغيلي (مقارن). يتم تطبيق جهد سن المنشار بتردد ثابت عالٍ على أحد مدخلاته ، ويتم تطبيق جهد تعديل منخفض التردد بسعة متغيرة على الآخر. يقارن المقارنة بين القيمتين ويولد نبضات مستطيلة عند الخرج ، ويتم تحديد مدتها بالقيمة الحالية لإشارة التعديل. في هذه الحالة ، فإن تردد PWM يساوي تردد إشارة سن المنشار.
الرقمية PWM
يعد تعديل عرض النبضة في التفسير الرقمي أحد الوظائف العديدة للمتحكم الدقيق (MC). يعمل MK بشكل حصري مع البيانات الرقمية ، ويمكنه توليد مستوى جهد مرتفع (100٪) أو منخفض (0٪) عند مخرجاته. ومع ذلك ، في معظم الحالات ، للتحكم الفعال في الحمل ، يجب تغيير الجهد عند خرج MK. على سبيل المثال ، ضبط سرعة دوران المحرك ، وتغيير سطوع LED. ما الذي يجب فعله للحصول على أي قيمة جهد في النطاق من 0 إلى 100٪ عند خرج الميكروكونترولر؟
تم حل المشكلة باستخدام طريقة تعديل عرض النبضة واستخدام ظاهرة زيادة العينات ، عندما يكون تردد التحويل المحدد أعلى بعدة مرات من استجابة الجهاز المتحكم فيه. عن طريق تغيير دورة عمل النبضات ، يتغير متوسط قيمة جهد الخرج. كقاعدة عامة ، تتم العملية برمتها بتردد يتراوح من عشرات إلى مئات كيلوهرتز ، مما يجعل من الممكن تحقيق ضبط سلس. من الناحية الفنية ، يتم تنفيذ ذلك باستخدام وحدة تحكم PWM - دائرة كهربائية متخصصة ، والتي تعد "قلب" أي نظام تحكم رقمي. يرجع الاستخدام النشط لوحدات التحكم القائمة على PWM إلى مزاياها التي لا يمكن إنكارها:
- كفاءة تحويل إشارة عالية ؛
- استقرار العمل
- توفير الطاقة التي يستهلكها الحمل ؛
- تكلفة منخفضة؛
- موثوقية عالية للجهاز بأكمله.
هناك طريقتان للحصول على إشارة PWM عند أطراف المتحكم الدقيق: الأجهزة والبرامج. يحتوي كل MK على مؤقت مدمج قادر على توليد نبضات PWM على دبابيس معينة. هذه هي الطريقة التي يتم بها تنفيذ الأجهزة. الحصول على إشارة PWM باستخدام أوامر البرنامج لديه المزيد من الخيارات من حيث الدقة ويسمح لك باستخدام المزيد من الدبابيس. ومع ذلك ، فإن طريقة البرنامج تؤدي إلى تحميل عالٍ لـ MK وتستهلك قدرًا كبيرًا من الذاكرة.
من الجدير بالذكر أنه في PWM الرقمي يمكن أن يختلف عدد النبضات لكل فترة ، ويمكن تحديد موقع النبضات نفسها في أي جزء من الفترة. يتم تحديد مستوى إشارة الخرج من خلال المدة الإجمالية لجميع النبضات في كل فترة. يجب أن يكون مفهوما أن كل نبضة إضافية هي انتقال لترانزستور القدرة من الحالة المفتوحة إلى الحالة المغلقة ، مما يؤدي إلى زيادة الخسائر أثناء التبديل.
مثال على استخدام وحدة تحكم PWM
تم بالفعل وصف أحد خيارات التنفيذ لوحدة تحكم PWM البسيطة مسبقًا في. إنه مبني على أساس دائرة كهربائية صغيرة وله ربط صغير. ولكن ، على الرغم من بساطة الدائرة ، فإن المنظم لديه مجموعة واسعة إلى حد ما من التطبيقات: دوائر التحكم في سطوع مصابيح LED ، وشرائط LED ، وضبط سرعة دوران محركات التيار المستمر.
اقرأ أيضا
مع PWM ، تغير علامة إشارة النمذجة التناظرية b (t) (الشكل أ) العرض (مدة النبضة (ج)) للحامل الفرعي بسعة ثابتة ومعدل تكرار.
يُطلق على PWM أحيانًا اسم DIM لتعديل النبضة الطويلة.
تميز PWM واحد ومزدوج الجانب.
مع PWM أحادي الجانب ، يحدث التغيير في عرض النبضة فقط بسبب تحول قطع النبض (PWM-1) (الشكل ب)
وبقطع على الوجهين والجزء الامامي من النبض PWM-2 (الشكل د)
الأكثر استخداما PWM-1

وسنفترض أن إشارة النمذجة
يتغير وفقًا للقانون التوافقي ، الذي وفقًا لذلك
عرض النبض هو:
أين  - انحراف مدة النبضة
- انحراف مدة النبضة
استبدال هذه القيمة  الى السابق
الى السابق
التعبير نحصل على الإشارة الطيفية لإشارة PWM.
من الأنسب أداء مُعدِّل إشارة PWM على الدوائر المتكاملة (ICs)

يتم تغذية المدخل 2 بحامل فرعي نبضي
المدخلات 5 - إشارة النمذجة التناظرية b (t)
غالبًا ما يكون مزيل تشكيل PWM هو LPF
27. تعديل النبض الطوري. مغيرات إشارة PIM.
مع PIM ، وفقًا لقانون الإشارة التناظرية المحاكاة b (t) ، يتغير فقط موضع الوقت لنبضات فيديو الموجة الحاملة الفرعية ، بينما يظل اتساعها ومدتها دون تغيير.
إذا قمت بالتفريق بين إشارة PWM في الوقت المناسب ، فسيتم الحصول على نبضات موجبة وسلبية.
تتوافق النبضة الموجبة مع مقدمة إشارة PWM ، وتتوافق النبضة السالبة مع قطعها.
باستخدام PWM أحادي الاتجاه ، تكون النبضات الإيجابية ثابتة ، ويتم إزاحة النبضات السالبة بما يتناسب مع إشارة النمذجة b (t) على طول محور الوقت.
يمكن التخلص من النبضات الثابتة باستخدام مقوم نصف موجي مقاوم وتكون النبضات المتبقية عبارة عن إشارات PPM.
يتكون مُعدِّل إشارة PWM في هذه الحالة من مُعدِّل PWM لإخراج جهاز التمايز DU ومُعدِّل نصف الموجة OB. (انظر الصورة)

التعبير التحليلي لإشارة PIM له الشكل:

 - سعة النبض
- سعة النبض
 - وظيفة تصف غلاف نبضة القياس.
- وظيفة تصف غلاف نبضة القياس.
 - انحراف الموضع الزمني لنبض القياس
- انحراف الموضع الزمني لنبض القياس
 - قيمة الرسالة المرسلة في الوقت الحالي
- قيمة الرسالة المرسلة في الوقت الحالي 
يصعب من الناحية التحليلية تمثيل طيف التردد لإشارات PIM
القيمة التقريبية لاتساع الإشارة التوافقية المرسلة في طيف PIM هي:

أين  - تردد الرسائل
- تردد الرسائل
 - مدة النبض
- مدة النبض
اتساع الإشارة المرسلة في طيف PWM صغير جدًا (أصغر بكثير مما هو عليه في أطياف AIM و PWM وهو دالة لتردد النمذجة  ، أي مشوهة).
، أي مشوهة).
لذلك ، فإن إزالة تشكيل إشارات PPM باستخدام مرشح تمرير منخفض ليس ممكنًا بشكل مباشر.
يتم تحويلها إلى إشارات AIM أو PWM.
28. تعديل نبض التردد. كاشفات إشارة Chim.
يمكن صنع الكاشف وفقًا للمخطط
أين F- مرشح القناة هيئة الأوراق المالية- محدد السعة العاصمة-الفرق. سلسلة؛ DV- مقوم نصف موجي مع حمولة نشطة ؛ OV- هزاز واحد د-كاشف مع مضاعفة الجهد. LPFمرشح تمرير منخفض.
يتم شرح تشغيل الكاشف بمساعدة مخططات التوقيت.

بعد المرور عبر الدوائر ضيقة النطاق لقناة الاتصال ، تصبح إشارة PFM مشابهة لإشارة FM التناظرية. من خلال كتلة AO ، يكون اتساعها محدودًا للغاية على كلا الجانبين بحيث تحدث نفس النبضات المستطيلة بمعدلات تكرار ومدد مختلفة عند خرجها. في كتلة التيار المستمر ، يتم تمييز هذه النبضات في الوقت المناسب ، ونتيجة لذلك ، عند إخراجها ، يمثل UDC (t) الجبهات والتخفيضات. هذه الأخيرة عبارة عن نبضات ثنائية القطب ضيقة جدًا ، والتي يتم تحويلها في كتلة DW إلى Umot أحادي القطب (t) ، وبالتالي مضاعفة معدل التكرار. في كتلة OB ، يتم تكوين نبضات مستطيلة متطابقة من نفس المدة ، ولكن بمعدلات تكرار مختلفة ، والتي يتم تغذيتها إلى مدخلات الكتلة D. مخطط تخطيطي للكتلة D:

عند إخراج الدائرة توجد إشارة تناظرية مرسلة Ud (t). في بعض الحالات ، يتم استبعاد كتلة OB. أدى الاستقرار العالي لمعلمات هذا الكاشف إلى تطبيقه على نطاق واسع حتى لإشارات FM التناظرية.
تعديل عرض النبض. وصف. تطبيق. (10+)
تعديل عرض النبض
تتمثل إحدى طرق تقليل فقد التسخين لعناصر الطاقة في الدوائر في استخدام أوضاع تبديل التشغيل. في مثل هذه الأوضاع ، يكون عنصر الطاقة إما مفتوحًا ، ثم لا يوجد أي انخفاض في الجهد عمليًا عليه ، أو مغلقًا ، ثم يتدفق تيار صفري خلاله. الطاقة المبعثرة تساوي ناتج التيار والجهد. المزيد عن هذا على الرابط. في هذا الوضع يمكن تحقيق كفاءة تزيد عن 80٪.
للحصول على إشارة بالشكل المطلوب عند الخرج ، يفتح مفتاح الطاقة لفترة زمنية معينة تتناسب مع جهد الخرج المطلوب. هذا هو تعديل عرض النبضة (PWM ، PWM). علاوة على ذلك ، تدخل مثل هذه الإشارة ، التي تتكون من نبضات ذات عروض مختلفة ، في مرشح يتكون من خنق ومكثف. عند إخراج المرشح ، يتم الحصول على إشارة شبه مثالية للشكل المطلوب.
تطبيق تعديل عرض النبض (PWM)
لسوء الحظ ، تحدث الأخطاء بشكل دوري في المقالات ، ويتم تصحيحها ، ويتم استكمال المقالات وتطويرها ، ويتم إعداد مقالات جديدة. اشترك في الأخبار لتبقى على اطلاع.
إذا كان هناك شيء غير واضح ، فتأكد من السؤال!
طرح سؤال. مناقشة المادة. رسائل.
المزيد من المقالات
محول النبض القوي. عملية حسابية. احسب. متصل. أوه...
الحساب عبر الإنترنت لمحول الطاقة النبضي ....
كيف لا تخلط بين زائد وناقص؟ عكس حماية قطبية. مخطط...
دائرة حماية القطبية العكسية (عكس القطبية) لأجهزة الشحن ...
العاكس الرنان ، محول زيادة الجهد. مبدأ ص ...
تجميع وتعديل محول تصعيد الجهد. وصف مبدأ العمل ...
الدائرة التذبذبية. مخطط. عملية حسابية. تطبيق. صدى. رنين...
حساب وتطبيق الدوائر التذبذبية. ظاهرة الرنين. تسلسلي...
نبضة بسيطة لتحويل الجهد إلى الأمام. 5-12 ث ...
رسم تخطيطي لمحول جهد بسيط لتشغيل مكبر تشغيلي ....
مصحح معامل القدرة. مخطط. عملية حسابية. مبدأ التشغيل....
دائرة مصحح عامل القدرة ...
افعل ذلك بنفسك bespereboynik. UPS ، UPS تفعل ذلك بنفسك. الجيب الجيبي ...
كيف تقوم بتحويل غير متقطع بنفسك؟ جهد الخرج الجيبي البحت ، مع ...
محول النبض القوي للطاقة ، الاختناق. لف. يصنع...
تقنيات لف خنق نبضي / محول ...
لماذا تنطفئ الأضواء ببطء شديد في دور السينما؟
-لأن عارض الإسقاط يفصل القابس ببطء شديد.
مقدمة في تعديل عرض النبضة.
في وقت سابق ، تعلمنا كيفية التحكم في LED من خلال تغيير حالة منفذ GPIO. تعلمنا كيفية التحكم في مدة وتواتر النبضات ، وبفضل ذلك حصلنا على تأثيرات ضوئية مختلفة. لقد تأكدنا من أنك إذا قمت بتغيير حالة المنفذ بتردد صوتي ، فيمكنك أن تكون مختلفًا
الأصوات ، يتقن تعديل التردد ...
وماذا يحدث إذا قمنا بتغيير مستوى المنفذ بتردد صوتي ، ولكن بدلاً من مكبر الصوت ، قمنا بتوصيل صديقنا التجريبي القديم - مصباح LED؟
اجر تجربة. قم بتعديل برنامج blink.c الخاص بنا بحيث يتم تشغيل وإيقاف LED 200 مرة في الثانية ، بتردد 200 هرتز. للقيام بذلك ، ما عليك سوى تغيير معلمات وظيفة delay (). لمعرفة التأخير في الدخول ، يكفي حساب فترة التذبذب T. T = 1 / و. ومنذ ذلك الحين f تساوي 200 هرتز ، ثم T \ u003d 1/200 \ u003d 0.005 ثانية ، أو 5 مللي ثانية. بالنسبة لهذه الأجزاء الخمسة من الثانية ، يجب أن يكون لدينا الوقت لتشغيل LED وإيقاف تشغيله مرة واحدة. نظرًا لأن 5 في 2 غير قابلة للقسمة ، فلنأخذ وقت توهج LED البالغ 2 مللي ثانية ، والوقت غير المتوهج 3 مللي ثانية. 2 + 3 = 5 ، أي ستبقى الفترة الكاملة للتذبذب 5 مللي ثانية. لنقم الآن بتغيير البرنامج: استبدل التأخير (500) بالتأخير (2) والتأخير (3) للتشغيل والإيقاف
المصابيح على التوالي.
دعونا نقوم بتجميع البرنامج وتشغيله. إذا كان لا يزال لديك مكبر صوت مثبت في الدائرة ، فسوف تسمع صوتًا منخفضًا ، وإذا استبدلت السماعة بمصباح LED ، فسترى مؤشر LED مضاء باستمرار. في الواقع ، يومض LED بالطبع ، لكنه يفعل ذلك بسرعة كبيرة بحيث لم تعد العين تلاحظ هذا الوميض وتدركه
إنه مثل توهج مستمر. لكن لا يبدو أن الصمام الثنائي يلمع بنفس السطوع الذي كان يحترق معنا. للمقارنة ، يمكنك تشغيل برنامجنا الأول ، حيث كان مؤشر LED قيد التشغيل باستمرار ، ومقارنة سطوع LED في كلتا الحالتين. دعونا نرى سبب حدوث ذلك وكيف يمكن استخدامه.
تذكر ، في الجزء الأول ، قمنا بحساب المقاوم المحدد الحالي لتشغيل LED؟ نحن نعلم أن LED له تيار عمل يتوهج فيه بشكل أكثر سطوعًا. إذا تم تقليل هذا التيار ، فسوف ينخفض أيضًا سطوع LED. وعندما نبدأ بسرعة في تشغيل وإيقاف LED ، إذن
يصبح سطوعه يعتمد على متوسط التيار (Iср) لفترة التذبذب. بالنسبة للإشارة النبضية (على شكل P) التي ننتجها عند إخراج منفذ GPIO ، فإن متوسط التيار سيكون متناسبًا مع نسبة t1 إلى t2. وهي: Iср = في x t1 / t2 ، حيث In هو التيار المقدر لمصباح LED ، والذي قمنا بتعيينه على 10mA بفضل المقاوم. في التصنيف الحالي ، يضيء مؤشر LED بشكل أكثر سطوعًا. وفي حالتنا ، Iср = 10 × 2/3 = 6.7 مللي أمبير. نرى أن التيار أصبح أقل ، لذلك بدأ مؤشر LED يحترق بدرجة أقل من السطوع. في هذه الصيغة ، تسمى النسبة t1 / t2 دورة العملد.
كلما زاد هذا المعامل ، زاد متوسط القيمة الحالية. يمكننا تغيير هذه النسبة من 0 إلى 1 ، أو من 0٪ إلى 100٪. إذن ، يمكننا تغيير متوسط التيار داخل هذه الحدود. اتضح أنه بهذه الطريقة يمكننا ضبط سطوع LED من الحد الأقصى إلى إيقاف التشغيل تمامًا! وعلى الرغم من أن الجهد عند خرج المنفذ الخاص بنا لا يزال بإمكانه أن يكون + 3.3 فولت أو 0 فولت فقط ، فإن التيار في دائرتنا يمكن أن يتغير. ومن خلال تغيير هذا التيار ، يمكننا بسهولة التحكم في Malinka. يسمى هذا النوع من التحكم تعديل عرض النبض، أو ببساطة PWM. في اللغة الإنجليزية يبدو مثل PWM، أو P. تعديل عرض النبضة. PWM هي إشارة نبضية ذات تردد ثابت مع دورة عمل متغيرة. يستخدم أيضًا تعريف كإشارة نبضية ذات تردد ثابت مع دورة عمل متغيرة. دورة العمل S هي المعاملة بالمثل لدورة العمل وتميز نسبة فترة النبض T إلى مدتها t1.
S = T / t1 = 1 / د.
حسنًا ، بالنسبة لنا ، لتوطيد معرفتنا ، يبقى كتابة برنامج يعمل بسلاسة وإيقاف تشغيل LED الخاص بنا. تسمى عملية تغيير سطوع التوهج يعتم.
حصلت عليه مثل هذا:
باهتة
// يقوم البرنامج بتغيير سطوع LED بسلاسة
// LED متصلة بالمنفذ P1_03 # تتضمن
انت مين()
{
إذا (! bcm2835_init ()) إرجاع 1 ؛
Bcm2835_gpio_fsel (PIN ، BCM2835_GPIO_FSEL_OUTP) ؛
// تعيين المنفذ P1_03 لإخراج int t_on، t_off؛
// t_on مدة حالة التشغيل = t1 ، و t_off- من حالة الإيقاف = t2
كثافة العمليات د = 100 ، ط ، ي ، علم = 0 ؛ // d- دورة العمل بالنسبة المئوية ، i و j ، المتغيرات المساعدة لتنظيم الدورات ، العلم- إذا = 0 ينطفئ مؤشر LED ، إذا كان = 1 يشتعل
كثافة العمليات أ = 10 ؛ // عدد دورات العمل الكاملة
بينما (أ)
{
لـ (j = 100؛ j! = 0؛ j--) // قم بتغيير عامل التعبئة من 100٪ إلى 0٪
{
t_on = 50 * د ؛ // ابحث عن t1
t_off = 50 * (100-د) ؛ // ابحث عن t2
إذا (العلم == 0) د = د -1 ؛ // إذا كان مؤشر LED يتلاشى ، فقلل من دورة العمل
إذا (العلم == 1) د = د + 1 ؛ // إذا أضاء المصباح ، فقم بزيادة دورة العمل
من أجل (i = 10 ؛ i! = 0 ؛ i--) // انقل 10 نبضات إلى مؤشر LED باستخدام المعلمات المحسوبة t1 و t2
{
bcm2835_gpio_write (PIN ، منخفض) ؛
تأخير ميكروثانية (t_on) ؛
bcm2835_gpio_write (PIN ، عالية) ؛
تأخير ميكروثانية (t_off) ؛
}
إذا (د == 0) علم = 1 ؛ // إذا كان مؤشر LED مطفأ ، فابدأ في تشغيله
إذا (د == 100) علم = 0 ؛ // إذا وصل مؤشر LED إلى الحد الأقصى من التوهج ، فسنبدأ في إخماده
}
أ--؛
}
العودة (! bcm2835_close ()) ، // الخروج من البرنامج
}
نقوم بحفظ البرنامج تحت اسم dimmer.c ، نقوم بالتجميع والتشغيل.
كما ترى ، يخرج مصباح LED الخاص بنا الآن ببطء ويشتعل ببطء. هذه هي الطريقة التي يعمل بها PWM. يستخدم تعديل عرض النبضة في العديد من المجالات. يتضمن ذلك التحكم في سطوع المصابيح ومصابيح LED ، والتحكم في الماكينات ، وتنظيم الجهد في تبديل مزودات الطاقة (التي ، على سبيل المثال ، في جهاز الكمبيوتر الخاص بك) ، في المحولات الرقمية إلى التناظرية ومن التناظرية إلى الرقمية ، إلخ. بالمناسبة ، إذا عدنا إلى دائرة مكبرات الصوت الخاصة بنا ، فبمساعدة PWM يمكنك التحكم في حجم الإشارة ، وتغيير التردد ونغتها.
هل تتذكر الحكاية القديمة من مقدمة هذا الجزء ، حول قيام عارض العرض بسحب القابس من المقبس ببطء؟ نحن نعلم الآن أن هذا الإسقاط ، من أجل إطفاء الضوء بسلاسة ، يجب ، على العكس من ذلك ، إدخال القابس وسحبه بسرعة كبيرة من المقبس.
هذا هو المكان الذي سننهي فيه هذا الدرس. يبقى فقط إضافة أن PWM يتم استخدامه كثيرًا في التطبيقات المختلفة التي غالبًا ما يقوم مصنعو معدات المعالج ببناء وحدة تحكم PWM مباشرة في المعالج. هؤلاء. تقوم بتعيين معلمات الإشارة التي تحتاجها إلى المعالج ، ويقوم المعالج نفسه ، دون مساعدتك ، بإصدار الإشارة التي تحتاجها. في نفس الوقت ، دون إنفاق أي موارد برمجية على توليد هذه الإشارة. يحتوي Bcm2835 أيضًا على أجهزة PWM مدمجة. وتعد ميزة PWM هذه ميزة بديلة لمنفذ GPIO 18 أو P1-12. لاستخدام PWM للأجهزة ، يجب علينا ضبط منفذ P1-12 على وضع ALT5 وتعيين معلمات المعالج. لكن هذه قصة مختلفة تمامًا ...