Vietoj PWM rezonansinė grandinė. Impulso pločio moduliavimas, PWM, PWM, valdymas, reguliavimas, reguliatorius, moduliatorius
8. Impulso pločio moduliavimas keitikliuose
8.1. Bendra informacija
Impulsų valdymo ir moduliavimo principai aptariami sk. 4 paprasčiausios nuolatinės srovės reguliatoriaus grandinės pavyzdyje. Kartu pateikiami pagrindinių tiesinių impulsų sistemų teorijoje naudojamų impulsų moduliavimo tipų apibrėžimai, atitinkantys impulsinių nuolatinės srovės keitiklių valdymo praktiką.
Tačiau kintamosios srovės keitiklių įtampų ar srovių impulsų pločio moduliavimas galios elektronikoje turi šiek tiek kitokį apibrėžimą, atsižvelgiant į PWM ypatybes sprendžiant elektros energijos konvertavimo į kintamąją srovę problemas. Kaip apibrėžta IEC 551-16-30, impulsų pločio moduliavimas reiškia impulsų valdymą, kai impulsų plotis arba dažnis arba abu yra moduliuojami per pagrindinio dažnio laikotarpį, kad būtų sukurta tam tikra išėjimo įtampos bangos formos forma. . Daugeliu atvejų PWM atliekamas siekiant užtikrinti sinusoidinę įtampą ar srovę, ty sumažinti aukštesnių harmonikų lygį, palyginti su pagrindine (pirma) harmonika, ir vadinamas sinusoidiniu. Yra šie pagrindiniai sinusoidiškumo užtikrinimo būdai: analoginis PWM ir jo modifikacijos; atrankinis (atrankinis) aukštesnių harmonikų slopinimas; histerezė arba delta moduliacija;
erdvės vektoriaus moduliacija.
Klasikinė analoginio sinusoidinio PWM organizavimo versija yra pakeisti išėjimo įtampą (srovę) formuojančių impulsų plotį, lyginant tam tikros formos įtampos signalą, vadinamą atskaita arba atskaita, su trikampiu įtampos signalu, turinčiu didesnis dažnis ir vadinamas nešlio signalu. Atskaitos signalas yra moduliuojantis ir nustato reikiamą išėjimo įtampos (srovės) formą. Yra daug šio metodo modifikacijų, kuriose moduliuojantys signalai yra pavaizduoti specialiomis funkcijomis, išskyrus sinusoidę. Paskaitų užrašai apims keletą pagrindinių grandinių, paaiškinančių šiuos PWM metodus.
Aukštesnių harmonikų selektyvaus slopinimo metodas šiuo metu sėkmingai įgyvendinamas naudojant programinės įrangos pagrindu veikiančius mikroprocesorinius valdiklius. Histerezės moduliavimas pagrįstas relės „sekimo“ pagal atskaitos signalą, pavyzdžiui, sinusinės bangos formos, principais. Paprasčiausiu techniniu įgyvendinimu šis metodas sujungia PWM ir PFM (impulsinio dažnio moduliavimo) principus. Tačiau specialiomis grandinės priemonėmis galima stabilizuoti moduliacijos dažnį arba apriboti jo kitimo diapazoną.
Erdvės vektoriaus moduliavimo metodas pagrįstas trifazės įtampos sistemos konvertavimu į dvifazę ir apibendrinto erdvės vektoriaus gavimu. Šio vektoriaus reikšmė apskaičiuojama laikotarpiais, kuriuos lemia pagrindiniai ir moduliuojantys dažniai. Manoma, kad jis yra labai perspektyvus valdant trifazius keitiklius, ypač naudojant juos elektrinėje pavaroje. Tuo pačiu metu jis daugeliu atžvilgių panašus į tradicinį sinusinės bangos PWM.
PWM pagrįstos valdymo sistemos leidžia ne tik pateikti vidutinių įtampos ar srovės pagrindinės harmonikos reikšmių sinusoidinę formą, bet ir valdyti jos amplitudės, dažnio ir fazės reikšmes. Kadangi tokiais atvejais keitiklis naudoja visiškai valdomus jungiklius, kintamosios srovės (DC) keitiklių veikimas kartu su kintamosios srovės tinklu tampa įmanomas visuose keturiuose kvadrantuose tiek lyginimo, tiek invertavimo režimais su bet kuria pagrindinio galios koeficiento cosφ verte. svyruoja nuo -1 iki 1. Be to, padidėjus nešlio dažniui, plečiasi galimybės atkurti tam tikros formos srovės ir įtampos keitiklius išėjime. Tai leidžia sukurti aktyvius filtrus, kad slopintų aukštesnes harmonikas.
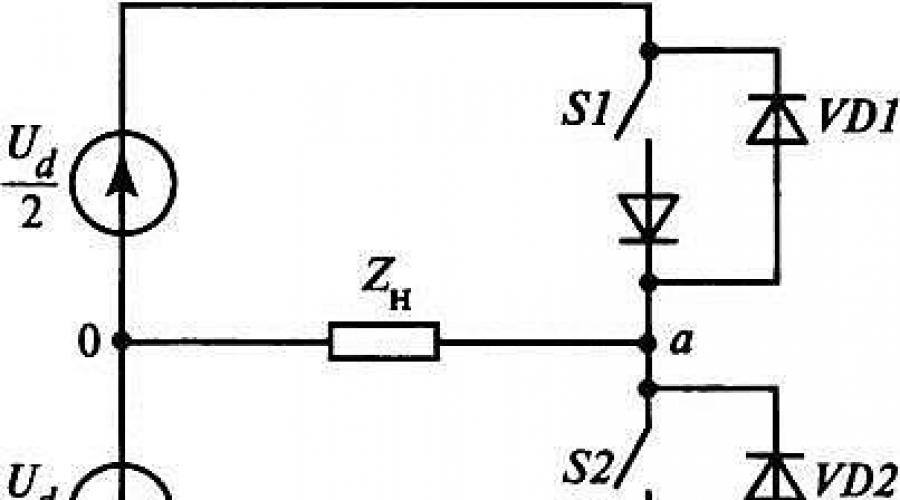
Pagrindinius apibrėžimus, naudojamus tolimesniame pristatyme, nagrinėsime pirmojo metodo taikymo įtampos keitiklio vienfazėje pustilties grandinėje pavyzdžiu (8.1 pav. bet). Šioje sąlyginėje schemoje raktai S1 Ir S2 yra pavaizduoti visiškai valdomi perjungimo elementai, papildyti nuosekliai ir lygiagrečiai su jais sujungtais diodais. Serijiniai diodai atspindi vienakryptį klavišų (pavyzdžiui, tranzistorių ar tiristorių) laidumą, o lygiagretūs diodai užtikrina atvirkštinės srovės laidumą su aktyvia-indukcine apkrova.
Moduliuojančios atskaitos schemos u M (θ) ir nešiklis u H (θ) signalai parodyti fig. 8.1, b. Rakto valdymo impulsų generavimas S 1 ir S 2 atliekamas pagal tokį principą. At u M (θ) > u H(θ) klavišas S 1 įjungtas, a S 2 išjungtas. At u M(θ)< u H (θ) klavišų būsenos yra atvirkštinės: S 2 – įjungta, a S 1 – išjungta. Taigi keitiklio išvestyje susidaro įtampa dviejų polinių impulsų pavidalu. Realiose grandinėse, kad būtų išvengta vienalaikio raktų laidumo S 1 ir S 2, norint įjungti šiuos klavišus, tarp signalų generavimo momentų turėtų būti numatytas tam tikras vėlavimas. Akivaizdu, kad impulso plotis priklauso nuo signalo amplitudės santykio u M (θ) ir u H(θ). Šį santykį apibūdinantis parametras vadinamas amplitudės moduliacijos indeksu ir nustatomas pagal (8.1) formulę:
, (8.1.)
kur U M m ir U H m - didžiausios moduliuojančio signalo vertės u M (θ) ir nešiklio signalas u H(θ), atitinkamai.


Ryžiai. 8.1. Vienfazis pusiau tiltinis įtampos keitiklis: bet- schema; b– impulsinės moduliacijos įtampos diagramos
Nešlio dažnis u H (θ) yra lygus perjungimo dažniui f H klavišai S 1 ir S 2 ir paprastai gerokai viršija moduliuojančio signalo dažnį f M. Dažnio santykis f H ir f M yra svarbus moduliavimo proceso efektyvumo rodiklis ir vadinamas dažnio moduliacijos indeksu, kuris nustatomas pagal (8.2) formulę:
Dėl mažų vertybių M f signalus u M (θ) ir u H (θ) turi būti sinchronizuotas, kad būtų išvengta nepageidaujamų subharmonijų. B kaip didžiausia vertė mano, kuris lemia sinchronizacijos poreikį, yra nustatytas M f = 21. Akivaizdu, kad su sinchronizuotais signalais ir koeficientu M f yra konstanta.
Iš diagramos pav. 8.1 matyti, kad išėjimo įtampos pirmosios harmonikos amplitudė U 1 pakeitimas, atsižvelgiant į (8.1), gali būti pavaizduotas tokia forma (8.3):
![]() (8.3)
(8.3)
Pagal (8.3) už M a = 1 išėjimo įtampos pirmosios harmonikos amplitudė lygi pusbangio stačiakampio aukščiui U d/2. Išėjimo įtampos pirmosios harmonikos santykinės vertės charakteristika priklausomybė nuo M a reikšmės parodyta fig. 8.2, kuris rodo, kad pokytis M a nuo 0 iki 1 yra tiesinis ir priklauso nuo amplitudės U esu 1. Ribinė vertė M a nustatomas pagal nagrinėjamo moduliavimo tipo principą, pagal kurį didžiausia reikšmė U am 1 riboja stačiakampės pusbangos aukštis, lygus U d/2. Toliau didinant koeficientą M moduliacija lemia netiesinį amplitudės padidėjimą U am 1 iki didžiausios vertės, nustatytos formuojant kvadratinės bangos įtampą keitiklio išvestyje, kuri vėliau lieka nepakitusi.
Stačiakampės funkcijos išplėtimas Furjė serijoje suteikia didžiausią reikšmę (8,4):
![]() (8.4)
(8.4)
Šią reikšmę riboja indekso reikšmė M a, svyruojantis intervale nuo 0 iki maždaug 3. Akivaizdu, kad reikšmių nuo 1 iki 3,2 intervalo a-b funkcija yra netiesinė (8.2 pav.). Veikimo režimas šiame skyriuje vadinamas permoduliacija.
Reikšmė M f lemia nešlio signalo dažnio pasirinkimas u H (θ) ir reikšmingai įtakoja keitiklio technines charakteristikas. Didėjant dažniui, didėja perjungimo nuostoliai keitiklių galios jungikliuose, tačiau tuo pačiu gerėja išėjimo įtampos spektrinė sudėtis ir supaprastėja aukštesnių harmonikų filtravimo dėl moduliavimo proceso problemos sprendimas. Svarbus veiksnys renkantis vertę f H daugeliu atvejų yra poreikis užtikrinti jo vertę didesniame nei 20 kHz garso dažnių diapazone. Renkantis f H taip pat turėtų atsižvelgti į keitiklio darbinės įtampos lygį, jo galią ir kitus parametrus.

Ryžiai. 8.2. Išėjimo įtampos pagrindinės harmonikos amplitudės santykinės vertės priklausomybė nuo amplitudės moduliacijos indekso vienfazėje pustilčio grandinėje
Bendra tendencija čia yra M verčių didėjimas f mažos galios ir žemos įtampos keitikliai ir atvirkščiai. Poeto pasirinkimas M f yra daugiatikslio optimizavimo problema.
Impulsų moduliavimas su stochastiniu procesu. PWM naudojimas keitikliuose yra susijęs su aukštesnių harmonikų atsiradimu moduliuojamose įtampose ir srovėse. Be to, šių parametrų spektrinėje kompozicijoje svarbiausios harmonikos atsiranda dažniuose, kurie yra dažnio moduliacijos indekso kartotiniai. M f ir harmonikos, sugrupuotos aplink juos šalutiniais dažniais su mažėjančia amplitude. Didesnės harmonikos gali sukelti šias pagrindines problemas:
akustinio triukšmo atsiradimas;
elektromagnetinio suderinamumo (EMS) su kitais elektros prietaisais ar sistemomis pablogėjimas.
Pagrindiniai akustinio triukšmo šaltiniai yra elektromagnetiniai komponentai (droseliai ir transformatoriai), kuriuos veikia srovė ir įtampa, kurioje yra aukštesnių harmonikų, kurių dažniai yra garso diapazone. Reikėtų pažymėti, kad triukšmas gali kilti tam tikrais dažniais, kur aukštesnės harmonikos yra didžiausios. Triukšmą sukeliantys veiksniai, tokie kaip magnetostrikcijos reiškinys, apsunkina EMS problemos sprendimą. EMS problemos gali kilti plačiame dažnių diapazone, priklausomai nuo elektros prietaisų elektromagnetinių trukdžių lygio. Tradiciškai triukšmo lygiui mažinti naudojami dizaino ir technologiniai sprendimai, o EMS užtikrinti – pasyvieji filtrai.
Metodai, susiję su moduliuojamų įtampų ir srovių spektrinės sudėties keitimu, laikomi perspektyvia šių problemų sprendimo kryptimi. Šių metodų esmė – suvienodinti dažnių spektrą ir sumažinti ryškių harmonikų amplitudę dėl jų stochastinio pasiskirstymo plačiame dažnių diapazone. Ši technika kartais vadinama dažnių spektro „ištepimu“. Trikdžių energijos koncentracija mažėja tokiais dažniais, kuriuose harmonikos gali būti didžiausios. Šių metodų įgyvendinimas nėra susijęs su poveikiu keitiklių galios dalies komponentams ir daugeliu atvejų yra ribojamas programinių įrankių, šiek tiek pakeitus valdymo sistemą.
Trumpai apsvarstykime šių metodų įgyvendinimo principus. PWM pagrįstas darbo ciklo pokyčiu γ= t Ir / T n, kur t u - impulso trukmė; T n- jo susidarymo laikotarpis. Paprastai šios reikšmės, taip pat pulso padėtis periodo intervale T n pastovios būsenos yra pastovios. PWM rezultatai apibrėžiami kaip integralios vidutinės vertės. Šiuo atveju deterministinės t reikšmės ir impulsų padėtis sukelia nepalankią moduliuojamų parametrų spektrinę sudėtį. Jei šiems dydžiams suteikiamas atsitiktinis pobūdis, išlaikant nurodytą γ reikšmę, tada procesai tampa stochastiniai ir keičiasi moduliuojamų parametrų spektrinė sudėtis. Pavyzdžiui, toks atsitiktinis simbolis gali būti suteiktas impulso vietai t o periodo intervale T n arba pateikti pastarojo stochastinį pokytį. Tam tikslui gali būti naudojamas atsitiktinių skaičių generatorius, kuris veikia pagrindinį moduliacijos dažnio generatorių f n =1/T n. Panašiai galite pakeisti pulso padėtį intervale T n kai matematinė viltis lygi nuliui. Vidutinė integralo reikšmė γ turi išlikti valdymo sistemos nustatytame lygyje, dėl to bus išlyginta aukštesnių harmonikų spektrinė sudėtis moduliuojamose įtampose ir srovėse.
Klausimai savikontrolei
1. Išvardykite pagrindinius PWM metodus sinusinei srovei arba įtampai gauti.
2. Kuo skiriasi vienpolis įtampos moduliavimas ir dvipolis?
3. Išvardykite pagrindinius PWM parametrus.
4. Koks PWM panaudojimo su stochastiniais procesais tikslas?
Impulso pločio moduliacija (PWM) yra signalo konvertavimo būdas, kai keičiasi impulso trukmė (darbo ciklas), o dažnis išlieka pastovus. Anglų kalba jis vadinamas PWM (impulso pločio moduliacija). Šiame straipsnyje mes išsamiai suprasime, kas yra PWM, kur jis naudojamas ir kaip jis veikia.
Taikymo sritis
Tobulėjant mikrovaldiklių technologijai, PWM atsivėrė naujos galimybės. Šis principas tapo pagrindu elektroniniams įrenginiams, kuriems reikalingas ir išvesties parametrų reguliavimas, ir jų palaikymas tam tikrame lygyje. Impulso pločio moduliacijos metodas naudojamas šviesos ryškumui, variklių sukimosi greičiui keisti, taip pat impulsinio tipo maitinimo šaltinių (PSU) galios tranzistorių valdyti.
Impulso pločio (PW) moduliacija aktyviai naudojama kuriant LED šviesumo valdymo sistemas. Dėl mažos inercijos šviesos diodas turi laiko persijungti (mirksėti ir užgesti) kelių dešimčių kHz dažniu. Jo veikimą impulsiniu režimu žmogaus akis suvokia kaip nuolatinį švytėjimą. Savo ruožtu ryškumas priklauso nuo impulso trukmės (atviros šviesos diodo būsenos) per vieną periodą. Jei impulso laikas yra lygus pauzės laikui, tai yra, darbo ciklas yra 50%, tada šviesos diodo ryškumas bus pusė vardinės vertės. Populiarėjant 220 V LED lempoms, iškilo klausimas, kaip padidinti jų veikimo patikimumą esant nestabiliai įėjimo įtampai. Sprendimas buvo rastas universalios mikroschemos pavidalu - maitinimo tvarkykle, veikiančia impulso pločio arba impulso dažnio moduliavimo principu. Išsamiai aprašyta viena iš šių tvarkyklių pagrįsta grandinė.
Tinklo įtampa, tiekiama į tvarkyklės mikroschemos įvestį, nuolat lyginama su grandinės atskaitos įtampa, išėjime formuojant PWM (PFM) signalą, kurio parametrus nustato išoriniai rezistoriai. Kai kurios mikroschemos turi išvestį analoginiam arba skaitmeniniam valdymo signalui tiekti. Taigi impulsų tvarkyklės veikimą galima valdyti naudojant kitą SHI keitiklį. Įdomu tai, kad šviesos diodas gauna ne aukšto dažnio impulsus, o droseliu išlygintą srovę, kuri yra nepakeičiamas tokių grandinių elementas.
Masinis PWM naudojimas atsispindi visuose LCD skydeliuose su LED foniniu apšvietimu. Deja, LED monitoriuose dauguma SHI keitiklių veikia šimtų hercų dažniu, o tai neigiamai veikia kompiuterių vartotojų regėjimą.
Arduino mikrovaldiklis taip pat gali veikti PWM valdiklio režimu. Norėdami tai padaryti, iškvieskite funkciją AnalogWrite () su reikšmėmis nuo 0 iki 255, nurodytomis skliausteliuose. Nulis atitinka 0 V, o 255 - 5 V. Tarpinės vertės apskaičiuojamos proporcingai.
Įrenginių, veikiančių PWM principu, paplitimas leido žmonijai atitolti nuo linijinio tipo transformatorių maitinimo šaltinių. Dėl to kelis kartus padidėja efektyvumas ir sumažėja energijos šaltinių svoris bei dydis.
PWM valdiklis yra neatsiejama šiuolaikinio perjungiamojo maitinimo dalis. Jis valdo galios tranzistoriaus, esančio impulsinio transformatoriaus pirminėje grandinėje, veikimą. Dėl grįžtamojo ryšio grandinės įtampa PSU išėjime visada išlieka stabili. Mažiausias išėjimo įtampos nuokrypis per grįžtamąjį ryšį fiksuojamas mikroschema, kuri akimirksniu pakoreguoja valdymo impulsų darbo ciklą. Be to, modernus PWM valdiklis išsprendžia daugybę papildomų užduočių, kurios pagerina maitinimo patikimumą:
- suteikia švelnaus keitiklio paleidimo režimą;
- riboja valdymo impulsų amplitudę ir darbo ciklą;
- kontroliuoja įėjimo įtampos lygį;
- apsaugo nuo trumpojo jungimo ir maitinimo jungiklio perkaitimo;
- prireikus įjungia įrenginį į budėjimo režimą.
PWM valdiklio veikimo principas
PWM valdiklio užduotis yra valdyti maitinimo jungiklį keičiant valdymo impulsus. Kai veikia rakto režimu, tranzistorius yra vienoje iš dviejų būsenų (visiškai atidarytas, visiškai uždarytas). Uždaroje būsenoje srovė per p-n sandūrą neviršija kelių μA, o tai reiškia, kad sklaidos galia linkusi į nulį. Atviroje būsenoje, nepaisant didelės srovės, p-n sandūros varža yra per maža, o tai taip pat lemia nereikšmingus šilumos nuostolius. Didžiausias šilumos kiekis išsiskiria perėjimo iš vienos būsenos į kitą momentu. Tačiau dėl trumpo perėjimo proceso laiko, palyginti su moduliavimo dažniu, galios praradimas perjungimo metu yra nereikšmingas.
Impulso pločio moduliavimas skirstomas į du tipus: analoginį ir skaitmeninį. Kiekvienas tipas turi savo privalumų ir gali būti įdiegtas grandinėse įvairiais būdais.
Analoginis PWM
Analoginio SHI moduliatoriaus veikimo principas pagrįstas dviejų signalų, kurių dažnis skiriasi keliomis eilėmis, palyginimu. Palyginimo elementas yra operacinis stiprintuvas (komparatorius). Vienam iš jo įėjimų įvedama aukšto pastovaus dažnio pjūklinė įtampa, o į kitą – žemo dažnio moduliacinė kintamos amplitudės įtampa. Komparatorius lygina abi reikšmes ir išvestyje generuoja stačiakampius impulsus, kurių trukmę lemia esama moduliuojančio signalo vertė. Šiuo atveju PWM dažnis yra lygus pjūklo signalo dažniui.
Skaitmeninis PWM
Impulso pločio moduliavimas skaitmeninėje interpretacijoje yra viena iš daugelio mikrovaldiklio (MC) funkcijų. Veikdamas tik su skaitmeniniais duomenimis, MK gali generuoti aukštą (100%) arba žemą (0%) įtampos lygį savo išėjimuose. Tačiau daugeliu atvejų norint efektyviai valdyti apkrovą, reikia pakeisti įtampą MK išėjime. Pavyzdžiui, reguliuoti variklio sukimosi greitį, keisti šviesos diodo ryškumą. Ką daryti, kad mikrovaldiklio išvestyje gautumėte bet kokią įtampos vertę nuo 0 iki 100%?
Problema išspręsta taikant impulsų pločio moduliacijos metodą ir naudojant oversampling reiškinį, kai nurodytas perjungimo dažnis kelis kartus didesnis už valdomo įrenginio atsaką. Keičiant impulsų darbo ciklą, pasikeičia vidutinė išėjimo įtampos vertė. Paprastai visas procesas vyksta nuo dešimčių iki šimtų kHz, o tai leidžia pasiekti sklandų reguliavimą. Techniškai tai įgyvendinama naudojant PWM valdiklį – specializuotą mikroschemą, kuri yra bet kurios skaitmeninės valdymo sistemos „širdis“. Aktyvus PWM pagrindu veikiančių valdiklių naudojimas yra dėl neabejotinų pranašumų:
- didelis signalo konvertavimo efektyvumas;
- darbo stabilumas;
- taupyti apkrovos sunaudotą energiją;
- žema kaina;
- didelis viso įrenginio patikimumas.
Yra du būdai gauti PWM signalą mikrovaldiklio kontaktuose: techninė ir programinė įranga. Kiekvienas MK turi įmontuotą laikmatį, kuris gali generuoti PWM impulsus tam tikruose kaiščiuose. Taip pasiekiamas aparatinės įrangos diegimas. PWM signalo gavimas naudojant programinės įrangos komandas turi daugiau raiškos galimybių ir leidžia naudoti daugiau kontaktų. Tačiau programinės įrangos metodas lemia didelį MK apkrovimą ir užima daug atminties.
Pažymėtina, kad skaitmeniniame PWM impulsų skaičius per laikotarpį gali būti skirtingas, o patys impulsai gali būti bet kurioje laikotarpio dalyje. Išvesties signalo lygis nustatomas pagal bendrą visų impulsų per periodą trukmę. Reikėtų suprasti, kad kiekvienas papildomas impulsas yra galios tranzistoriaus perėjimas iš atviros būsenos į uždarą būseną, dėl ko perjungimo metu padidėja nuostoliai.
PWM valdiklio naudojimo pavyzdys
Viena iš paprasto PWM valdiklio įgyvendinimo parinkčių jau buvo aprašyta anksčiau. Jis pagamintas mikroschemos pagrindu ir turi nedidelį dirželį. Tačiau, nepaisant grandinės paprastumo, reguliatorius turi gana platų pritaikymo spektrą: šviesos diodų ryškumo valdymo grandinės, LED juostos, nuolatinės srovės variklių sukimosi greičio reguliavimas.
Taip pat skaitykite
Naudojant PWM, analoginio modeliavimo signalo ženklas b(t) (A pav.) keičia antrinio nešlio plotį (impulso trukmę (c)) esant pastoviai amplitudei ir pasikartojimo dažniui.
PWM kartais vadinamas ilgo impulso moduliavimo DIM.
Atskirkite VIENOS ir DVIPUSIOS PWM.
Naudojant vienpusį PWM, impulso pločio pokytis atsiranda tik dėl impulsų išjungimo (PWM-1) poslinkio (B pav.)
Ir su dvipusiu pjūviu ir impulso PWM-2 priekiu (D pav.)
Plačiausiai naudojamas PWM-1

Ir mes manysime, kad modeliavimo signalas
keičiasi pagal harmonikų dėsnį, pagal kurį
impulso plotis yra:
Kur  - pulso trukmės nuokrypis
- pulso trukmės nuokrypis
Pakeičiant šią vertę  į ankstesnį
į ankstesnį
išraišką gauname PWM signalo spektrinį signalą.
Patogiausia PWM signalo moduliatorių atlikti integruotose grandinėse (IC)

2 įėjimas maitinamas impulsiniu antriniu nešikliu
5 įėjimas – analoginio modeliavimo signalas b(t)
PWM demoduliatorius dažniausiai yra LPF
27. Fazinis-impulsinis moduliavimas. PIM signalo moduliatoriai.
Naudojant PIM, pagal imituojamo analoginio signalo b(t) dėsnį, keičiasi tik antrinio nešlio vaizdo impulsų padėtis laike, o jų amplitudė ir trukmė išlieka nepakitę.
Jei laiku atskirsite PWM signalą, gaunami teigiami ir neigiami impulsai.
Teigiamas impulsas atitinka priekinę PWM signalo dalį, o neigiamas impulsas atitinka jo ribą.
Naudojant vienpusį PWM teigiami impulsai yra stacionarūs, o neigiami proporcingai paslinkami modeliavimo signalui b(t) išilgai laiko ašies.
Nejudančius impulsus galima pašalinti varžiniu pusbangiu lygintuvu, o likę impulsai yra PPM signalai.
PWM signalo moduliatorius šiuo atveju susideda iš PWM moduliatoriaus, prie kurio išėjimo yra prijungtas diferencijavimo įrenginys DU ir pusbangis lygintuvas OB. (žr. paveikslėlį)

Analitinė signalo PIM išraiška yra tokia:

 - pulso amplitudė
- pulso amplitudė
 -Funkcija, apibūdinanti matavimo impulso gaubtą.
-Funkcija, apibūdinanti matavimo impulso gaubtą.
 - matavimo impulso laiko padėties pakeitimas
- matavimo impulso laiko padėties pakeitimas
 - perduoto pranešimo vertė laiko momentu
- perduoto pranešimo vertė laiko momentu 
PIM signalų dažnių spektrą sunku atvaizduoti analitiškai
Apytikslė perduodamo harmoninio signalo amplitudės PIM spektre vertė yra:

Kur  - pranešimų dažnumas
- pranešimų dažnumas
 - pulso trukmė
- pulso trukmė
Perduodamo signalo amplitudė PWM spektre yra labai maža (daug mažesnė nei AIM ir PWM spektruose ir priklauso nuo modeliavimo dažnio  , t.y. iškraipytas).
, t.y. iškraipytas).
Todėl PPM signalų demoduliavimas žemųjų dažnių filtru tiesiogiai neįmanomas.
Jie konvertuojami į AIM arba PWM signalus.
28. Dažnio-impulso moduliavimas. Chim signalo detektoriai.
Detektorius gali būti pagamintas pagal schemą
Kur F- kanalo filtras; UAB- amplitudės ribotuvas; DC-diff. grandinė; DV-dviejų pusbangių lygintuvas su aktyvia apkrova; OV- vienas vibratorius; D-detektorius su įtampos padvigubėjimu; LPF- žemo dažnio filtras.
Detektoriaus veikimas paaiškinamas naudojant laiko diagramas.

Praėjęs per ryšio kanalo siaurajuostes grandines, PFM signalas tampa panašus į analoginį FM signalą. Dėl AO bloko jo amplitudė iš abiejų pusių yra labai apribota, todėl jo išvestyje atsiranda tie patys stačiakampiai skirtingo pasikartojimo dažnio ir trukmės impulsai. DC bloke šie impulsai yra diferencijuojami laike, todėl jo išvestyje UDC (t) reiškia frontus ir pjūvius. Pastarieji yra labai siauri dvipoliai impulsai, kurie DW bloke paverčiami vienpoliais Umot(t), taip padvigubinant pasikartojimo dažnį. OB bloke formuojami vienodi vienodos trukmės, bet skirtingo pasikartojimo dažnio stačiakampiai impulsai, kurie tiekiami į D bloko įvestį D bloko schema:

Grandinės išėjime yra perduodamas analoginis signalas Ud(t). Kai kuriais atvejais OB blokas neįtraukiamas. Didelis šio detektoriaus parametrų stabilumas paskatino jį plačiai pritaikyti net ir analoginiams FM signalams.
Impulso pločio moduliavimas. Apibūdinimas. Taikymas. (10+)
Impulso pločio moduliavimas
Vienas iš būdų sumažinti grandinių galios elementų šildymo nuostolius yra perjungimo režimų naudojimas. Tokiais režimais galios elementas yra arba atidarytas, tada ant jo praktiškai nėra nulinio įtampos kritimo, arba uždarytas, tada per jį teka nulinė srovė. Išsklaidyta galia lygi srovės ir įtampos sandaugai. Daugiau apie tai nuorodoje. Šiuo režimu galima pasiekti didesnį nei 80% efektyvumą.
Norint gauti norimos formos signalą išėjime, maitinimo jungiklis atsidaro tam tikram laikui, proporcingai norimai išėjimo įtampai. Tai impulsų pločio moduliavimas (PWM, PWM). Be to, toks signalas, susidedantis iš skirtingo pločio impulsų, patenka į filtrą, susidedantį iš droselio ir kondensatoriaus. Filtro išvestyje gaunamas beveik tobulas norimos formos signalas.
Impulso pločio moduliacijos (PWM) taikymas
Deja, straipsniuose klaidų pasitaiko periodiškai, jos taisomos, straipsniai papildomi, tobulinami, ruošiami nauji. Prenumeruokite naujienas, kad būtumėte informuoti.
Jei kas neaišku, būtinai klauskite!
Užduok klausimą. Straipsnio diskusija. žinutes.
Daugiau straipsnių
Galingas impulsinis transformatorius. Mokėjimas. Apskaičiuoti. Prisijungęs. O...
Galios impulsų transformatoriaus skaičiavimas internetu....
Kaip nesupainioti pliuso ir minuso? Apsauga nuo atvirkštinio poliškumo. Schema...
Įkroviklių atvirkštinio poliškumo apsaugos grandinė (poliškumo pakeitimas)...
Rezonansinis keitiklis, įtampos didinimo keitiklis. R principas...
Padidinimo įtampos keitiklio surinkimas ir reguliavimas. Darbo principo aprašymas...
Virpesių grandinė. Schema. Mokėjimas. Taikymas. Rezonansas. Rezonansinis...
Virpesių grandinių skaičiavimas ir taikymas. Rezonanso reiškinys. Eilės...
Paprastas impulsų priekinės įtampos keitiklis. 5-12 w...
Paprasto įtampos keitiklio, skirto operaciniam stiprintuvui maitinti, schema....
Galios koeficiento korektorius. Schema. Mokėjimas. Veikimo principas....
Galios koeficiento korektoriaus grandinė...
„Pasidaryk pats“ bespereboynik. UPS, UPS pasidaryk pats. Sinusinė, sinusoidinė...
Kaip patiems pasidaryti nepertraukiamą jungiklį? Grynai sinusinė išėjimo įtampa, su...
Galingas impulsinis transformatorius, droselis. Apvija. Padaryti...
Impulsinio droselio / transformatoriaus apvijos būdai ....
Kodėl kino teatruose šviesos užgęsta taip lėtai?
-Kadangi projektionistas labai lėtai ištraukia kištuką.
Įvadas į impulsų pločio moduliavimą.
Anksčiau mes išmokome valdyti šviesos diodą keičiant GPIO prievado būseną. Išmokome valdyti impulsų trukmę ir dažnį, kurių dėka gavome įvairius apšvietimo efektus. Įsitikinome, kad pakeitę prievado būseną garso dažniu, galite gauti kitokią
garsai, įvaldyta dažnio moduliacija...
O kas atsitiks, jei prievado lygį pakeisime garso dažniu, bet vietoj garsiakalbio prijungsime savo seną eksperimentinį draugą - LED?
Padaryk eksperimentą. Modifikuokite mūsų blink.c programą, kad šviesos diodas įsijungtų ir išsijungtų 200 kartų per sekundę, 200 Hz dažniu. Norėdami tai padaryti, tiesiog pakeiskite funkcijos delay() parametrus. Norėdami sužinoti, kokius vėlavimus reikia įvesti, pakanka apskaičiuoti svyravimo periodą T. T=1/f. Ir nuo tada f yra lygus 200 Hz, tada T \u003d 1/200 \u003d 0,005 sekundės arba 5 milisekundės. Šioms 5 milisekundėms turime turėti laiko įjungti šviesos diodą ir vieną kartą jį išjungti. Kadangi 5 iš 2 nesidalija, imkime 2 ms šviesos diodo švytėjimo laiką, o 3 ms nešvytimo laiką. 2+3=5, t.y. visas vieno svyravimo periodas išliks 5ms. Dabar pakeiskime programą: uždelsimą (500) pakeiskite vėlavimu (2) ir vėlavimą (3) įjungimui ir išjungimui
LED atitinkamai.
Sukompiliuokime programą ir paleiskime ją. Jei grandinėje vis dar turite įdiegtą garsiakalbį, tada girdėsite žemą garsą, o jei pakeisite garsiakalbį LED, pamatysite nuolat šviečiantį LED. Tiesą sakant, šviesos diodas, žinoma, mirksi, bet tai daro taip greitai, kad akis nebepastebi šio mirksėjimo ir suvokia
tai tarsi nuolatinis švytėjimas. Bet atrodo, kad diodas nebešviečia taip ryškiai, kaip degdavo pas mus. Palyginimui galite paleisti pačią pirmąją mūsų programą, kurioje nuolat degė šviesos diodas, ir abiem atvejais palyginti šviesos diodo ryškumą. Pažiūrėkime, kodėl taip nutinka ir kaip tai galima panaudoti.
Prisiminkite, kad pačioje pirmoje dalyje apskaičiavome srovę ribojantį rezistorių, skirtą šviesos diodui maitinti? Žinome, kad šviesos diodas turi darbinę srovę, kuria jis šviečia ryškiausiai. Jei ši srovė sumažinama, sumažės ir šviesos diodo ryškumas. Ir kai pradedame greitai įjungti ir išjungti šviesos diodą, tada
jo ryškumas tampa priklausomas nuo vidutinės srovės (Iср) virpesių periodui. Impulsinio (P formos) signalo, kurį generuojame GPIO prievado išvestyje, vidutinė srovė bus proporcinga t1 ir t2 santykiui. Būtent: Iср=In x t1/t2, kur In yra vardinė šviesos diodo srovė, kurią rezistoriaus dėka nustatome į 10mA. Esant vardinei srovei, šviesos diodas šviečia ryškiausiai. O mūsų atveju Iср = 10 x 2/3 = 6,7 mA. Matome, kad srovė sumažėjo, todėl šviesos diodas pradėjo degti ne taip ryškiai. Šioje formulėje vadinamas santykis t1/t2 darbo ciklas D.
Kuo didesnis šis koeficientas, tuo didesnė vidutinė srovės vertė. Šį santykį galime pakeisti nuo 0 iki 1 arba nuo 0% iki 100%. Taigi, šiose ribose galime pakeisti vidutinę srovę. Pasirodo, tokiu būdu galime reguliuoti šviesos diodo ryškumą nuo maksimalaus iki visiško išjungimo! Ir nors įtampa mūsų prievado išėjime vis tiek gali būti tik +3,3 V arba 0 V, srovė mūsų grandinėje gali keistis. Ir pakeitę šią srovę galime nesunkiai valdyti savo Malinką. Toks valdymas vadinamas Impulso pločio moduliavimas, arba tiesiog PWM. Angliškai tai skamba PWM, arba P impulso pločio moduliacija. PWM yra pastovaus dažnio impulsinis signalas su kintamu darbo ciklu. Taip pat naudojamas toks apibrėžimas kaip pastovaus dažnio impulsinis signalas su kintamu darbo ciklu. Darbo ciklas S yra darbo ciklo atvirkštinis dydis ir apibūdina impulso periodo T santykį su jo trukme t1.
S=T/t1=1/D.
Na, o mums, norint įtvirtinti žinias, belieka parašyti programą, kuri sklandžiai įjungs ir išjungs mūsų LED. Švytėjimo ryškumo keitimo procesas vadinamas Pritemdymas.
Gavau taip:
dimmer.c
// Programa sklandžiai keičia šviesos diodo ryškumą
// LED prijungtas prie prievado P1_03#include
int main ()
{
if (!bcm2835_init()) return 1;
Bcm2835_gpio_fsel(PIN,BCM2835_GPIO_FSEL_OUTP);
//Nustatyti prievadą P1_03, kad būtų išvestas nepasirašytas int t_on, t_off;
// įjungtos būsenos t_on trukmė = t1 ir išjungtos būsenos t_off- = t2
Int d = 100, i, j, vėliavėlė = 0; // d- darbo ciklas procentais, i ir j, pagalbiniai kintamieji ciklų organizavimui, vėliavėlė - jei =0 šviesos diodas užgęsta, jei =1 - įsižiebia
int a=10; // užbaigtų darbo ciklų skaičius
tuo tarpu (a)
{
už (j=100; j!=0; j--) //pakeiskite užpildymo koeficientą iš 100 % į 0 %
{
t_on=50*d; // rasti t1
t_off=50*(100-d); // rasti t2
jei (vėliava==0) d=d-1; // jei šviesos diodas blėsta, sumažinkite darbo ciklą
jei (vėliava==1) d=d+1; // jei užsidega šviesos diodas, padidinkite darbo ciklą
Jei (i=10; i!=0; i--) //perkelkite 10 impulsų į šviesos diodą su apskaičiuotais parametrais t1 ir t2
{
bcm2835_gpio_write(PIN, LOW);
delsimasMikrosekundes(t_on);
bcm2835_gpio_write(PIN kodas, AUKŠTAS);
delsimasMikrosekundės(t_off);
}
Jei (d==0) vėliavėlė=1; // jei šviesos diodas nedega, pradėkite jį įjungti
jei (d==100) vėliavėlė=0; // jei šviesos diodas pasiekė maksimalų švytėjimą, pradedame jį gesinti
}
A--;
}
return(!bcm2835_close()); // Išeikite iš programos
}
Išsaugome programą pavadinimu dimmer.c, sukompiliuojame ir paleidžiame.
Kaip matote, dabar mūsų šviesos diodas pamažu užgęsta ir lėtai užsidega. Taip veikia PWM. Impulso pločio moduliavimas naudojamas daugelyje sričių. Tai apima lempų ir šviesos diodų ryškumo valdymą, servo valdymą, įtampos reguliavimą perjungiamuose maitinimo šaltiniuose (kurie, pavyzdžiui, yra jūsų kompiuteryje), skaitmeninio-analoginio ir analoginio-skaitmeninio keitikliuose ir kt. Beje, jei grįšime prie savo garsiakalbių grandinės, tai PWM pagalba galima valdyti signalo garsumą, o keičiant dažnį – jo toną.
Prisimenate seną anekdotą iš šios dalies pratarmės apie tai, kad projekcininkas lėtai ištraukia kištuką iš lizdo? Dabar žinome, kad šis projektorius, norėdamas sklandžiai išjungti šviesą, priešingai, labai greitai įkiša ir ištraukia kištuką iš lizdo.
Tuo mes baigsime šią pamoką. Belieka tik pridurti, kad PWM taip dažnai naudojamas įvairiose programose, kad procesorių įrangos gamintojai dažnai stato PWM valdiklį tiesiai į procesorių. Tie. jūs nustatote procesoriui reikalingo signalo parametrus, o pats procesorius be jūsų pagalbos išduoda jums reikalingą signalą. Tuo pačiu metu neišleidžiant jokių programinės įrangos išteklių šio signalo generavimui. Bcm2835 taip pat turi įmontuotą aparatinę PWM. Ir šis PWM yra alternatyvi GPIO 18 arba P1-12 prievado funkcija. Norėdami naudoti aparatinę PWM, turime nustatyti P1-12 prievadą į ALT5 režimą ir nustatyti procesoriaus parametrus. Bet tai visai kita istorija...