วงจรเรโซแนนท์แทน PWM การมอดูเลตความกว้างพัลส์, PWM, PWM, การควบคุม, การควบคุม, เรกูเลเตอร์, โมดูเลเตอร์
8. การมอดูเลตความกว้างพัลส์ในคอนเวอร์เตอร์
8.1. ข้อมูลทั่วไป
หลักการของการควบคุมชีพจรและการมอดูเลตจะกล่าวถึงในบทที่ 4 ในตัวอย่างของวงจรควบคุมกระแสตรงที่ง่ายที่สุด ในเวลาเดียวกัน ให้คำจำกัดความสำหรับประเภทหลักของการปรับพัลส์ที่ใช้ในทฤษฎีของระบบพัลส์เชิงเส้น ซึ่งสอดคล้องกับแนวปฏิบัติของการควบคุมคอนเวอร์เตอร์ DC แบบพัลซิ่ง
อย่างไรก็ตาม การปรับความกว้างพัลส์ของแรงดันหรือกระแสในตัวแปลงไฟฟ้ากระแสสลับมีคำจำกัดความที่แตกต่างกันเล็กน้อยในอุปกรณ์อิเล็กทรอนิกส์กำลัง โดยคำนึงถึงคุณสมบัติของ PWM เมื่อแก้ปัญหาการแปลงไฟฟ้าเป็นกระแสสลับ ตามที่กำหนดไว้ใน IEC 551-16-30 การปรับความกว้างของพัลส์หมายถึงการควบคุมแรงกระตุ้นซึ่งความกว้างหรือความถี่ของพัลส์หรือทั้งสองอย่าง ถูกมอดูเลตภายในช่วงความถี่พื้นฐานเพื่อสร้างรูปร่างเฉพาะของรูปคลื่นของแรงดันไฟขาออก . ในกรณีส่วนใหญ่ PWM จะดำเนินการเพื่อให้แน่ใจว่าแรงดันหรือกระแสไซน์นั่นคือเพื่อลดระดับฮาร์โมนิกที่สูงขึ้นเมื่อเทียบกับฮาร์มอนิกพื้นฐาน (แรก) และเรียกว่าไซน์ มีวิธีการหลัก ๆ ดังต่อไปนี้เพื่อให้มั่นใจว่าเป็นไซนัส: PWM แบบอะนาล็อกและการดัดแปลง; การปราบปรามแบบเลือก (เลือก) ของฮาร์โมนิกที่สูงขึ้น ฮิสเทรีซิสหรือการปรับเดลต้า;
การมอดูเลตเวกเตอร์อวกาศ
รุ่นคลาสสิกขององค์กรของ PWM ไซน์แบบแอนะล็อกคือการเปลี่ยนความกว้างของพัลส์ที่สร้างแรงดันเอาต์พุต (กระแส) โดยการเปรียบเทียบสัญญาณแรงดันไฟของรูปร่างที่กำหนด เรียกว่า ค่าอ้างอิงหรือค่าอ้างอิง กับสัญญาณแรงดันไฟรูปสามเหลี่ยมที่มี ความถี่สูงและเรียกว่าสัญญาณพาหะ สัญญาณอ้างอิงกำลังมอดูเลตและกำหนดรูปร่างที่ต้องการของแรงดันไฟขาออก (กระแส) วิธีการนี้มีการปรับเปลี่ยนหลายอย่าง ซึ่งสัญญาณการมอดูเลตจะแสดงด้วยฟังก์ชันพิเศษอื่นที่ไม่ใช่ไซนัส บันทึกการบรรยายจะครอบคลุมวงจรพื้นฐานหลายประการที่อธิบายวิธี PWM เหล่านี้
วิธีการเลือกปราบปรามฮาร์โมนิกที่สูงขึ้นในปัจจุบันประสบความสำเร็จโดยใช้ตัวควบคุมไมโครโปรเซสเซอร์ที่ใช้ซอฟต์แวร์ การมอดูเลตฮิสเทรีซิสขึ้นอยู่กับหลักการของการถ่ายทอด "ตาม" สัญญาณอ้างอิง ตัวอย่างเช่น รูปคลื่นไซน์ ในการดำเนินการทางเทคนิคที่ง่ายที่สุด วิธีนี้รวมหลักการของ PWM และ PFM (การปรับความถี่พัลส์) อย่างไรก็ตาม ด้วยมาตรการพิเศษของวงจร ทำให้ความถี่มอดูเลตเสถียรหรือจำกัดช่วงของการเปลี่ยนแปลงได้
วิธีการมอดูเลตเวคเตอร์อวกาศขึ้นอยู่กับการแปลงระบบแรงดันไฟสามเฟสเป็นสองเฟสและได้รับเวคเตอร์อวกาศทั่วไป ค่าของเวกเตอร์นี้คำนวณตามเวลาที่กำหนดโดยความถี่พื้นฐานและความถี่มอดูเลต ถือว่ามีแนวโน้มมากสำหรับการควบคุมอินเวอร์เตอร์สามเฟส โดยเฉพาะเมื่อใช้ในไดรฟ์ไฟฟ้า ในขณะเดียวกัน ก็มีหลายวิธีที่คล้ายกับ PWM แบบคลื่นไซน์แบบดั้งเดิม
ระบบควบคุมแบบ PWM-based ไม่เพียงแต่ให้รูปทรงไซน์ของค่าเฉลี่ยของแรงดันไฟหรือฮาร์มอนิกพื้นฐานในปัจจุบันเท่านั้น แต่ยังควบคุมค่าของแอมพลิจูด ความถี่ และเฟสได้อีกด้วย เนื่องจากในกรณีเหล่านี้ คอนเวอร์เตอร์ใช้สวิตช์ที่มีการควบคุมอย่างสมบูรณ์ จึงเป็นไปได้ที่จะนำการทำงานของคอนเวอร์เตอร์ AC (DC) มาใช้ร่วมกับเครือข่าย AC ในสี่ควอแดรนต์ทั้งในโหมดการแก้ไขและการกลับด้านด้วยค่าที่กำหนดของตัวประกอบกำลังพื้นฐาน cosφ ใน ช่วงตั้งแต่ -1 ถึง 1 นอกจากนี้ ด้วยความถี่พาหะที่เพิ่มขึ้น ความเป็นไปได้ในการสร้างอินเวอร์เตอร์กระแสและแรงดันไฟฟ้าของรูปแบบที่กำหนดที่เอาต์พุตจะขยายตัว สิ่งนี้ช่วยให้คุณสร้างตัวกรองแบบแอคทีฟเพื่อระงับฮาร์โมนิกที่สูงขึ้น
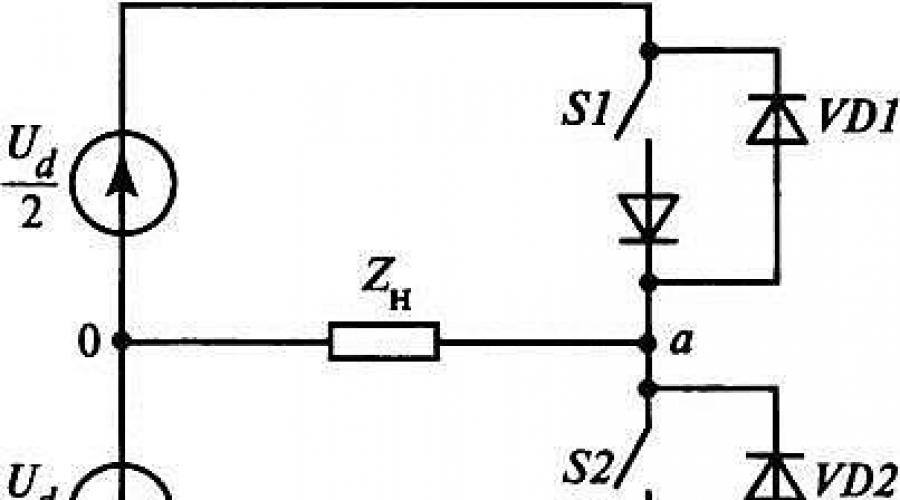
เราจะพิจารณาคำจำกัดความหลักที่ใช้ในการนำเสนอต่อไปโดยใช้ตัวอย่างการใช้วิธีแรกในวงจรครึ่งสะพานเฟสเดียวของอินเวอร์เตอร์แรงดันไฟฟ้า (รูปที่ 8.1, แต่). ในรูปแบบเงื่อนไขนี้ คีย์ ส1 และ ส2 ถูกแสดงโดยองค์ประกอบสวิตชิ่งที่ควบคุมอย่างสมบูรณ์ เสริมด้วยไดโอดที่เชื่อมต่อแบบอนุกรมและขนานกับพวกมัน ไดโอดแบบอนุกรมสะท้อนการนำคีย์แบบทิศทางเดียว (เช่น ทรานซิสเตอร์หรือไทริสเตอร์) ในขณะที่ไดโอดแบบขนานจะให้การนำกระแสย้อนกลับด้วยโหลดแบบแอกทีฟ-อินดัคทีฟ
ไดอะแกรมของการอ้างอิง มอดูเลต ยู M (θ) และผู้ให้บริการ ยูสัญญาณ H (θ) จะแสดงในรูปที่ 8.1, ข. คีย์ควบคุมการสร้างพัลส์ ส 1 และ ส 2 ดำเนินการตามหลักการดังต่อไปนี้ ที่ ยูม (θ) > ยูปุ่ม H(θ) ส 1 เปิดอยู่ a ส 2 ปิด. ที่ ยูม(θ)< ยู H (θ) สถานะของปุ่มจะกลับกัน: ส 2 - เปิดใช้งาน a ส 1 - ปิด ดังนั้นแรงดันไฟฟ้าจะเกิดขึ้นที่เอาต์พุตของอินเวอร์เตอร์ในรูปของพัลส์ขั้วสองขั้ว ในวงจรจริงเพื่อแยกการนำคีย์พร้อมกัน ส 1 และ ส 2 ควรมีความล่าช้าระหว่างช่วงเวลาของการสร้างสัญญาณเพื่อเปิดคีย์เหล่านี้ เห็นได้ชัดว่าความกว้างพัลส์ขึ้นอยู่กับอัตราส่วนของแอมพลิจูดของสัญญาณ ยู M (θ) และ ยู H(θ). พารามิเตอร์ที่ระบุลักษณะอัตราส่วนนี้เรียกว่าดัชนีการปรับแอมพลิจูดและกำหนดโดยสูตร (8.1):
, (8.1.)
ที่ไหน ยู M m และ ยู H m - ค่าสูงสุดของสัญญาณมอดูเลต ยู M (θ) และสัญญาณพาหะ ยู H(θ) ตามลำดับ


ข้าว. 8.1. อินเวอร์เตอร์แรงดันไฟกึ่งสะพานเฟสเดียว: แต่- โครงการ; ข– ไดอะแกรมแรงดันไฟฟ้าสำหรับการมอดูเลตพัลส์
ความถี่ของผู้ให้บริการ ยู H (θ) เท่ากับความถี่สวิตชิ่ง ฉแป้น H ส 1 และ ส 2 และมักจะเกินความถี่ของสัญญาณมอดูเลตอย่างมีนัยสำคัญ ฉม. อัตราส่วนความถี่ ฉมือ ฉ M เป็นตัวบ่งชี้ที่สำคัญของประสิทธิภาพของกระบวนการมอดูเลตและเรียกว่าดัชนีมอดูเลตความถี่ซึ่งกำหนดโดยสูตร (8.2):
สำหรับค่าเล็กน้อย เอ็ม ฉสัญญาณ ยู M (θ) และ ยูต้องซิงโครไนซ์ H (θ) เพื่อหลีกเลี่ยงฮาร์โมนิกที่ไม่ต้องการ B เป็นค่าสูงสุด ของฉันซึ่งกำหนดความจำเป็นในการซิงโครไนซ์ถูกตั้งค่า เอ็ม ฉ = 21. แน่นอนด้วยสัญญาณซิงโครไนซ์และค่าสัมประสิทธิ์ เอ็ม ฉเป็นค่าคงที่
จากแผนภาพในรูปที่ 8.1 จะเห็นได้ว่าแอมพลิจูดของฮาร์มอนิกแรกของแรงดันเอาต์พุต ยูน. 1 โดยคำนึงถึง (8.1) สามารถแสดงในรูปแบบต่อไปนี้ (8.3):
![]() (8.3)
(8.3)
ตาม (8.3) สำหรับ เอ็ม a = 1 แอมพลิจูดของฮาร์มอนิกแรกของแรงดันเอาต์พุตเท่ากับความสูงของสี่เหลี่ยมครึ่งคลื่น ยูง/2. ลักษณะการพึ่งพาอาศัยกันของค่าสัมพัทธ์ของฮาร์มอนิกแรกของแรงดันเอาต์พุตตามค่าของ M a แสดงในรูปที่ 8.2 ซึ่งแสดงว่าการเปลี่ยนแปลง เอ็ม a จาก 0 ถึง 1 เป็นเส้นตรงและขึ้นอยู่กับแอมพลิจูด ยูน. 1 . ค่าจำกัด เอ็ม a ถูกกำหนดโดยหลักการของประเภทของการปรับที่กำลังพิจารณาตามค่าสูงสุด ยู am 1 ถูกจำกัดด้วยความสูงของครึ่งคลื่นสี่เหลี่ยมเท่ากับ ยูง/2. ด้วยค่าสัมประสิทธิ์ที่เพิ่มขึ้นอีก เอ็มการมอดูเลตนำไปสู่การเพิ่มแอมพลิจูดที่ไม่เป็นเชิงเส้น ยูน. 1 ถึงค่าสูงสุดที่กำหนดโดยการก่อตัวของแรงดันคลื่นสี่เหลี่ยมที่เอาต์พุตของอินเวอร์เตอร์ซึ่งต่อมายังคงไม่เปลี่ยนแปลง
การขยายฟังก์ชันสี่เหลี่ยมในอนุกรมฟูริเยร์ให้ค่าสูงสุด (8.4):
![]() (8.4)
(8.4)
ค่านี้ถูกจำกัดโดยค่าดัชนี เอ็ม a ซึ่งอยู่ในช่วงตั้งแต่ 0 ถึงประมาณ 3 เห็นได้ชัดว่าฟังก์ชันในช่วงเวลา a-b ของค่าตั้งแต่ 1 ถึง 3.2 ไม่เป็นเชิงเส้น (รูปที่ 8.2) โหมดการทำงานในส่วนนี้เรียกว่าการมอดูเลต
ความหมาย เอ็ม ฉกำหนดโดยการเลือกความถี่สัญญาณพาหะ ยู H (θ) และมีผลอย่างมากต่อลักษณะทางเทคนิคของคอนเวอร์เตอร์ ด้วยความถี่ที่เพิ่มขึ้นการสูญเสียสวิตชิ่งในสวิตช์ไฟของคอนเวอร์เตอร์จะเพิ่มขึ้น แต่ในขณะเดียวกันองค์ประกอบสเปกตรัมของแรงดันเอาต์พุตก็ดีขึ้นและการแก้ปัญหาของการกรองฮาร์มอนิกที่สูงขึ้นเนื่องจากกระบวนการมอดูเลตนั้นง่ายขึ้น ปัจจัยสำคัญในการเลือกความคุ้มค่า ฉ H ในหลายกรณีคือความต้องการเพื่อให้แน่ใจว่าค่าของมันอยู่ในช่วงความถี่เสียงที่มากกว่า 20 kHz เมื่อเลือก ฉ H ควรคำนึงถึงระดับแรงดันไฟฟ้าในการทำงานของคอนเวอร์เตอร์ กำลังไฟฟ้า และพารามิเตอร์อื่นๆ ด้วย

ข้าว. 8.2. การพึ่งพาค่าสัมพัทธ์ของแอมพลิจูดของฮาร์มอนิกพื้นฐานของแรงดันเอาต์พุตบนดัชนีการมอดูเลตแอมพลิจูดสำหรับวงจรครึ่งสะพานเฟสเดียว
แนวโน้มทั่วไปที่นี่คือการเพิ่มขึ้นของค่า M ฉตัวแปลงพลังงานต่ำและแรงดันต่ำและในทางกลับกัน กวีทางเลือก เอ็ม ฉเป็นปัญหาการปรับให้เหมาะสมแบบหลายวัตถุประสงค์
การปรับพัลส์ด้วยกระบวนการสุ่ม. การใช้ PWM ในตัวแปลงมีความเกี่ยวข้องกับการปรากฏตัวของฮาร์มอนิกที่สูงขึ้นในแรงดันและกระแสมอดูเลต นอกจากนี้ ในองค์ประกอบสเปกตรัมของพารามิเตอร์เหล่านี้ ฮาร์มอนิกที่สำคัญที่สุดเกิดขึ้นที่ความถี่ที่เป็นทวีคูณของดัชนีมอดูเลตความถี่ เอ็ม ฉและฮาร์โมนิกส์จัดกลุ่มรอบ ๆ พวกมันที่ความถี่ด้านข้างด้วยแอมพลิจูดที่ลดลง ฮาร์โมนิกที่สูงขึ้นสามารถก่อให้เกิดปัญหาหลักดังต่อไปนี้:
การเกิดเสียงอะคูสติก
การเสื่อมสภาพของความเข้ากันได้ทางแม่เหล็กไฟฟ้า (EMC) กับอุปกรณ์หรือระบบไฟฟ้าอื่น ๆ
แหล่งที่มาหลักของเสียงอะคูสติกคือส่วนประกอบแม่เหล็กไฟฟ้า (โช้กและหม้อแปลงไฟฟ้า) ซึ่งได้รับผลกระทบจากกระแสและแรงดันไฟฟ้าที่มีฮาร์โมนิกที่สูงขึ้นพร้อมความถี่ในช่วงเสียง ควรสังเกตว่าเสียงสามารถเกิดขึ้นได้ในบางความถี่ โดยที่ฮาร์โมนิกที่สูงกว่าจะอยู่ที่ระดับสูงสุด ปัจจัยที่ก่อให้เกิดเสียงรบกวน เช่น ปรากฏการณ์ของสนามแม่เหล็ก ทำให้ความละเอียดของปัญหา EMC ซับซ้อนขึ้น ปัญหา EMC สามารถเกิดขึ้นได้ในช่วงความถี่กว้าง ขึ้นอยู่กับความรุนแรงของระดับการรบกวนทางแม่เหล็กไฟฟ้าของอุปกรณ์ไฟฟ้า ตามเนื้อผ้า มีการใช้โซลูชันการออกแบบและเทคโนโลยีเพื่อลดระดับเสียง และใช้ตัวกรองแบบพาสซีฟเพื่อให้แน่ใจว่า EMC
วิธีการที่เกี่ยวข้องกับการเปลี่ยนธรรมชาติขององค์ประกอบสเปกตรัมของแรงดันไฟและกระแสมอดูเลตถือเป็นแนวทางที่ดีในการแก้ปัญหาเหล่านี้ สาระสำคัญของวิธีการเหล่านี้คือการปรับสเปกตรัมความถี่ให้เท่ากันและลดแอมพลิจูดของฮาร์โมนิกที่เด่นชัดเนื่องจากการแจกแจงสุ่มในช่วงความถี่กว้าง เทคนิคนี้บางครั้งเรียกว่า "ละเลง" สเปกตรัมความถี่ ความเข้มข้นของพลังงานรบกวนจะลดลงที่ความถี่ซึ่งฮาร์โมนิกสามารถอยู่ที่ระดับสูงสุดได้ การใช้วิธีการเหล่านี้ไม่เกี่ยวข้องกับผลกระทบต่อส่วนประกอบของส่วนกำลังของคอนเวอร์เตอร์ และในกรณีส่วนใหญ่จะถูกจำกัดโดยเครื่องมือซอฟต์แวร์ที่มีการเปลี่ยนแปลงเล็กน้อยในระบบควบคุม
ให้เราพิจารณาหลักการของการใช้วิธีการเหล่านี้โดยสังเขป PWM ขึ้นอยู่กับการเปลี่ยนแปลงในรอบการทำงาน γ= tและ / ตู่ น, ที่ไหน tยู - ระยะเวลาชีพจร; ตู่ น- ระยะเวลาของการก่อตัวของมัน โดยปกติค่าเหล่านี้ เช่นเดียวกับตำแหน่งของพัลส์ในช่วงเวลาของคาบ ตู่ นอยู่ในสภาวะคงตัว ผลลัพธ์ PWM ถูกกำหนดให้เป็นค่าเฉลี่ยแบบอินทิกรัล ในกรณีนี้ ค่าที่กำหนดของ t และ และรวมถึงตำแหน่งพัลส์ทำให้เกิดองค์ประกอบสเปกตรัมที่ไม่เอื้ออำนวยของพารามิเตอร์มอดูเลต หากปริมาณเหล่านี้ได้รับอักขระแบบสุ่มในขณะที่รักษาค่าที่กำหนดของ γ ไว้ กระบวนการจะกลายเป็นสุ่มและองค์ประกอบสเปกตรัมของพารามิเตอร์ที่มอดูเลตจะเปลี่ยนไป ตัวอย่างเช่น อักขระสุ่มดังกล่าวสามารถกำหนดตำแหน่งของแรงกระตุ้นได้ tและในช่วงเวลาของคาบ T n หรือให้การเปลี่ยนแปลงสุ่มของช่วงหลัง เพื่อจุดประสงค์นี้ สามารถใช้ตัวสร้างตัวเลขสุ่ม ซึ่งทำหน้าที่เกี่ยวกับตัวสร้างความถี่มอดูเลตหลัก ฉ น =1/ตู่ น. ในทำนองเดียวกัน คุณสามารถเปลี่ยนตำแหน่งของพัลส์ในช่วงเวลา ตู่ นด้วยความคาดหวังทางคณิตศาสตร์เท่ากับศูนย์ ค่าอินทิกรัลเฉลี่ย γ จะต้องอยู่ที่ระดับที่กำหนดโดยระบบควบคุม ซึ่งเป็นผลมาจากองค์ประกอบสเปกตรัมของฮาร์โมนิกที่สูงกว่าในแรงดันและกระแสที่มอดูเลตจะเท่ากัน
คำถามเพื่อการควบคุมตนเอง
1. ระบุวิธี PWM หลักเพื่อให้กระแสหรือแรงดันไซน์
2. อะไรคือความแตกต่างระหว่างการมอดูเลตแรงดันไฟฟ้าแบบยูนิโพลาร์และไบโพลาร์?
3. ระบุพารามิเตอร์ PWM หลัก
4. จุดประสงค์ของการใช้ PWM กับกระบวนการสุ่มคืออะไร?
การปรับความกว้างพัลส์ (PWM) คือวิธีการแปลงสัญญาณที่ระยะเวลาพัลส์ (รอบหน้าที่) เปลี่ยนไป ในขณะที่ความถี่ยังคงที่ ในคำศัพท์ภาษาอังกฤษเรียกว่า PWM (การปรับความกว้างพัลส์) ในบทความนี้ เราจะเข้าใจในรายละเอียดว่า PWM คืออะไร ใช้ที่ไหน และทำงานอย่างไร
พื้นที่สมัคร
ด้วยการพัฒนาเทคโนโลยีไมโครคอนโทรลเลอร์ โอกาสใหม่ๆ ได้เปิดขึ้นสำหรับ PWM หลักการนี้ได้กลายเป็นพื้นฐานสำหรับอุปกรณ์อิเล็กทรอนิกส์ที่ต้องการทั้งการปรับพารามิเตอร์เอาต์พุตและคงไว้ซึ่งระดับที่กำหนด วิธีการมอดูเลตความกว้างพัลส์ใช้เพื่อเปลี่ยนความสว่างของแสง ความเร็วของการหมุนของเครื่องยนต์ ตลอดจนควบคุมทรานซิสเตอร์กำลังของพาวเวอร์ซัพพลายแบบพัลส์ (PSU)
การมอดูเลตความกว้างพัลส์ (PW) ถูกใช้อย่างแข็งขันในการสร้างระบบควบคุมความสว่าง LED เนื่องจากความเฉื่อยต่ำ LED จึงมีเวลาในการสลับ (แฟลชและดับ) ที่ความถี่หลายสิบเฮิร์ทซ การทำงานของมันในโหมดพัลซิ่งนั้นสายตามนุษย์รับรู้ว่าเป็นการเรืองแสงคงที่ ในทางกลับกัน ความสว่างจะขึ้นอยู่กับระยะเวลาของพัลส์ (สถานะเปิดของ LED) ในช่วงระยะเวลาหนึ่ง หากเวลาพัลส์เท่ากับเวลาหยุดชั่วคราว นั่นคือ รอบการทำงานคือ 50% จากนั้นความสว่างของ LED จะเป็นครึ่งหนึ่งของค่าที่ระบุ ด้วยความนิยมของหลอดไฟ LED 220V คำถามที่เกิดขึ้นคือการเพิ่มความน่าเชื่อถือของการทำงานด้วยแรงดันไฟฟ้าอินพุตที่ไม่เสถียร พบวิธีแก้ปัญหาในรูปแบบของไมโครเซอร์กิตสากล - ตัวขับกำลังที่ทำงานบนหลักการของการปรับความกว้างพัลส์หรือความถี่พัลส์ มีการอธิบายวงจรที่ยึดตามไดรเวอร์เหล่านี้อย่างละเอียด
แรงดันไฟหลักที่จ่ายให้กับอินพุตของไมโครเซอร์กิตไดรเวอร์จะถูกเปรียบเทียบอย่างต่อเนื่องกับแรงดันอ้างอิงในวงจร โดยสร้างสัญญาณ PWM (PFM) ที่เอาต์พุต ซึ่งพารามิเตอร์ที่กำหนดโดยตัวต้านทานภายนอก ไมโครเซอร์กิตบางตัวมีเอาต์พุตสำหรับส่งสัญญาณควบคุมอนาล็อกหรือดิจิตอล ดังนั้น การทำงานของไดรเวอร์พัลส์จึงสามารถควบคุมได้โดยใช้ตัวแปลง SHI อื่น ที่น่าสนใจคือ LED ไม่ได้รับพัลส์ความถี่สูง แต่เป็นกระแสที่ปรับให้เรียบโดยโช้คซึ่งเป็นองค์ประกอบที่ขาดไม่ได้ของวงจรดังกล่าว
การใช้งาน PWM จำนวนมากสะท้อนให้เห็นในแผง LCD ทั้งหมดที่มีไฟแบ็คไลท์ LED น่าเสียดาย ในจอภาพ LED ตัวแปลง SHI ส่วนใหญ่ทำงานที่ความถี่หลายร้อยเฮิรตซ์ ซึ่งส่งผลเสียต่อวิสัยทัศน์ของผู้ใช้พีซี
ไมโครคอนโทรลเลอร์ Arduino ยังสามารถทำงานในโหมดตัวควบคุม PWM ในการดำเนินการนี้ ให้เรียกใช้ฟังก์ชัน AnalogWrite () ด้วยค่าระหว่าง 0 ถึง 255 ที่ระบุในวงเล็บ Zero จะเท่ากับ 0V และ 255 ถึง 5V ค่ากลางจะคำนวณตามสัดส่วน
ความแพร่หลายของอุปกรณ์ที่ทำงานบนหลักการ PWM ทำให้มนุษยชาติสามารถย้ายออกจากแหล่งจ่ายไฟของหม้อแปลงชนิดเชิงเส้นได้ ส่งผลให้ประสิทธิภาพเพิ่มขึ้นและน้ำหนักและขนาดของแหล่งพลังงานลดลงหลายเท่า
ตัวควบคุม PWM เป็นส่วนสำคัญของแหล่งจ่ายไฟสลับที่ทันสมัย มันควบคุมการทำงานของทรานซิสเตอร์กำลังที่อยู่ในวงจรหลักของหม้อแปลงพัลส์ เนื่องจากมีวงจรป้อนกลับ แรงดันไฟฟ้าที่เอาต์พุต PSU จึงคงที่เสมอ ความเบี่ยงเบนเพียงเล็กน้อยของแรงดันเอาต์พุตผ่านการป้อนกลับได้รับการแก้ไขโดยไมโครเซอร์กิต ซึ่งจะแก้ไขรอบการทำงานของพัลส์ควบคุมทันที นอกจากนี้ตัวควบคุม PWM ที่ทันสมัยยังช่วยแก้ไขงานเพิ่มเติมจำนวนหนึ่งที่ปรับปรุงความน่าเชื่อถือของแหล่งจ่ายไฟ:
- จัดเตรียมโหมดการสตาร์ทแบบนุ่มนวลของคอนเวอร์เตอร์
- จำกัดแอมพลิจูดและรอบการทำงานของพัลส์ควบคุม
- ควบคุมระดับแรงดันไฟฟ้าขาเข้า
- ป้องกันการลัดวงจรและอุณหภูมิเกินของสวิตช์ไฟ
- ทำให้อุปกรณ์เข้าสู่โหมดสแตนด์บายหากจำเป็น
หลักการทำงานของตัวควบคุม PWM
งานของตัวควบคุม PWM คือการควบคุมสวิตช์ไฟโดยการเปลี่ยนพัลส์ควบคุม เมื่อทำงานในโหมดคีย์ ทรานซิสเตอร์จะอยู่ในสถานะใดสถานะหนึ่งจากสองสถานะ (เปิดเต็มที่ ปิดจนสุด) ในสถานะปิด กระแสที่ไหลผ่านจุดเชื่อมต่อ p-n ไม่เกินสองสาม μA ซึ่งหมายความว่ากำลังการกระจายมีแนวโน้มเป็นศูนย์ ในสถานะเปิด แม้จะมีกระแสสูง ความต้านทานของทางแยก p-n นั้นต่ำเกินไป ซึ่งนำไปสู่การสูญเสียความร้อนที่ไม่มีนัยสำคัญ ความร้อนปริมาณมากที่สุดจะถูกปล่อยออกมาในช่วงเวลาของการเปลี่ยนจากสถานะหนึ่งไปอีกสถานะหนึ่ง แต่เนื่องจากกระบวนการเปลี่ยนผ่านใช้เวลาสั้นเมื่อเทียบกับความถี่การมอดูเลต การสูญเสียพลังงานระหว่างการเปลี่ยนจึงเล็กน้อย
การปรับความกว้างพัลส์แบ่งออกเป็นสองประเภท: อนาล็อกและดิจิตอล แต่ละประเภทมีข้อดีของตัวเองและสามารถนำไปใช้ในวงจรได้หลายวิธี
อนาล็อก PWM
หลักการทำงานของโมดูเลเตอร์ SHI แบบอะนาล็อกนั้นขึ้นอยู่กับการเปรียบเทียบสัญญาณสองสัญญาณที่มีความถี่แตกต่างกันตามลำดับความสำคัญหลายขนาด องค์ประกอบเปรียบเทียบคือแอมพลิฟายเออร์ในการดำเนินงาน (ตัวเปรียบเทียบ) แรงดันไฟฟ้าฟันเลื่อยที่มีความถี่คงที่สูงถูกนำไปใช้กับอินพุตตัวใดตัวหนึ่ง และแรงดันไฟฟ้ามอดูเลตความถี่ต่ำพร้อมแอมพลิจูดแปรผันจะถูกนำไปใช้กับอินพุตอื่น เครื่องเปรียบเทียบจะเปรียบเทียบทั้งสองค่าและสร้างพัลส์สี่เหลี่ยมที่เอาต์พุต ระยะเวลาที่กำหนดโดยค่าปัจจุบันของสัญญาณมอดูเลต ในกรณีนี้ความถี่ PWM จะเท่ากับความถี่ของสัญญาณฟันเลื่อย
ดิจิตอล PWM
การปรับความกว้างพัลส์ในการตีความแบบดิจิทัลเป็นหนึ่งในหลายหน้าที่ของไมโครคอนโทรลเลอร์ (MC) การทำงานเฉพาะกับข้อมูลดิจิทัล MK สามารถสร้างระดับแรงดันไฟฟ้าสูง (100%) หรือต่ำ (0%) ที่เอาต์พุตได้ อย่างไรก็ตาม ในกรณีส่วนใหญ่ เพื่อควบคุมโหลดอย่างมีประสิทธิภาพ ต้องเปลี่ยนแรงดันไฟฟ้าที่เอาต์พุตของ MK เช่น การปรับความเร็วรอบของเครื่องยนต์ การเปลี่ยนความสว่างของ LED จะทำอย่างไรเพื่อให้ได้ค่าแรงดันไฟฟ้าในช่วง 0 ถึง 100% ที่เอาต์พุตของไมโครคอนโทรลเลอร์
ปัญหานี้แก้ไขได้ด้วยวิธีการมอดูเลตความกว้างพัลส์และการใช้ปรากฏการณ์โอเวอร์แซมปลิง เมื่อความถี่สวิตชิ่งที่ระบุสูงกว่าการตอบสนองของอุปกรณ์ควบคุมหลายเท่า โดยการเปลี่ยนรอบการทำงานของพัลส์ ค่าเฉลี่ยของแรงดันไฟขาออกจะเปลี่ยนไป ตามกฎแล้ว กระบวนการทั้งหมดจะเกิดขึ้นที่ความถี่ตั้งแต่สิบถึงร้อย kHz ซึ่งทำให้สามารถปรับได้อย่างราบรื่น ในทางเทคนิค จะใช้ตัวควบคุม PWM ซึ่งเป็นไมโครเซอร์กิตเฉพาะทาง ซึ่งเป็น "หัวใจ" ของระบบควบคุมแบบดิจิตอลใดๆ การใช้งานคอนโทรลเลอร์แบบ PWM-based ที่ใช้งานอยู่นั้นเกิดจากข้อดีที่ปฏิเสธไม่ได้:
- ประสิทธิภาพการแปลงสัญญาณสูง
- ความมั่นคงในการทำงาน
- ประหยัดพลังงานที่ใช้โดยโหลด
- ราคาถูก;
- ความน่าเชื่อถือสูงของอุปกรณ์ทั้งหมด
มีสองวิธีในการรับสัญญาณ PWM ที่พินของไมโครคอนโทรลเลอร์: ฮาร์ดแวร์และซอฟต์แวร์ MK แต่ละตัวมีตัวจับเวลาในตัวที่สามารถสร้างพัลส์ PWM บนพินบางตัวได้ นี่คือวิธีการใช้งานฮาร์ดแวร์ที่ประสบความสำเร็จ การรับสัญญาณ PWM โดยใช้คำสั่งซอฟต์แวร์มีตัวเลือกเพิ่มเติมในด้านความละเอียดและช่วยให้คุณใช้พินได้มากขึ้น อย่างไรก็ตาม วิธีซอฟต์แวร์ทำให้ MK โหลดสูงและกินเนื้อที่มาก
เป็นที่น่าสังเกตว่าใน PWM ดิจิตอลจำนวนพัลส์ต่อคาบอาจแตกต่างกันและพัลส์เองก็สามารถอยู่ในส่วนใดส่วนหนึ่งของคาบได้ ระดับสัญญาณเอาท์พุตถูกกำหนดโดยระยะเวลารวมของพัลส์ทั้งหมดต่อคาบ ควรเข้าใจว่าแต่ละพัลส์เพิ่มเติมคือการเปลี่ยนแปลงของทรานซิสเตอร์กำลังจากสถานะเปิดเป็นสถานะปิดซึ่งนำไปสู่การสูญเสียที่เพิ่มขึ้นในระหว่างการเปลี่ยน
ตัวอย่างการใช้ตัวควบคุม PWM
หนึ่งในตัวเลือกการใช้งานสำหรับคอนโทรลเลอร์ PWM แบบธรรมดาได้รับการอธิบายไว้ก่อนหน้านี้แล้ว มันถูกสร้างขึ้นบนพื้นฐานของไมโครเซอร์กิตและมีสายรัดขนาดเล็ก แต่ถึงแม้วงจรจะเรียบง่าย แต่ตัวควบคุมก็มีการใช้งานที่หลากหลาย: วงจรควบคุมสำหรับความสว่างของ LED, แถบ LED, การปรับความเร็วของการหมุนของมอเตอร์กระแสตรง
อ่านยัง
ด้วย PWM สัญญาณของสัญญาณแบบจำลองแอนะล็อก b(t) (รูปที่ A) เปลี่ยนความกว้าง (ระยะเวลาพัลส์ (c)) ของ subcarrier ด้วยแอมพลิจูดคงที่และอัตราการทำซ้ำ
PWM บางครั้งเรียกว่า DIM การปรับพัลส์แบบยาว
แยกแยะ PWM ด้านเดียวและสองด้าน
ด้วย PWM ด้านเดียว การเปลี่ยนแปลงความกว้างพัลส์เกิดขึ้นเฉพาะเนื่องจากการเปลี่ยนแปลงของคัทออฟพัลส์ (PWM-1) (รูปที่ B)
และด้วยการตัดแบบสองด้านและด้านหน้าของพัลส์ PWM-2 (รูปที่ D)
PWM-1 . ที่ใช้กันอย่างแพร่หลายมากที่สุด

และเราจะถือว่าสัญญาณโมเดลลิ่ง
เปลี่ยนแปลงไปตามกฏฮาร์โมนิกตามนั้น
ความกว้างพัลส์คือ:
ที่ไหน  - ส่วนเบี่ยงเบนระยะเวลาชีพจร
- ส่วนเบี่ยงเบนระยะเวลาชีพจร
แทนค่านี้  ไปก่อนหน้านี้
ไปก่อนหน้านี้
นิพจน์เราได้รับสัญญาณสเปกตรัมของสัญญาณ PWM
เป็นการสะดวกที่สุดในการทำโมดูเลเตอร์สัญญาณ PWM บนวงจรรวม (ICs)

อินพุต 2 ถูกป้อนด้วย subcarrier แบบพัลซิ่ง
อินพุต 5 – สัญญาณแบบจำลองแอนะล็อก b(t)
ตัวแยกสัญญาณ PWM มักเป็น LPF
27. การปรับเฟสพัลส์ ตัวปรับสัญญาณ PIM
ด้วย PIM ตามกฎของสัญญาณอะนาล็อกจำลอง b(t) เฉพาะตำแหน่งเวลาของพัลส์วิดีโอ subcarrier เท่านั้นที่เปลี่ยนแปลง ในขณะที่แอมพลิจูดและระยะเวลายังคงไม่เปลี่ยนแปลง
หากคุณแยกความแตกต่างของสัญญาณ PWM ในเวลา จะได้รับพัลส์บวกและลบ
พัลส์บวกสอดคล้องกับด้านหน้าของสัญญาณ PWM และพัลส์ลบสอดคล้องกับจุดตัด
ด้วย PWM แบบทางเดียว พัลส์บวกจะหยุดนิ่ง และพัลส์ลบจะเลื่อนตามสัดส่วนของสัญญาณการสร้างแบบจำลอง b(t) ตามแนวแกนเวลา
พัลส์ที่อยู่นิ่งสามารถกำจัดได้ด้วยวงจรเรียงกระแสครึ่งคลื่นแบบต้านทาน และพัลส์ที่เหลือคือสัญญาณ PPM
โมดูเลเตอร์สัญญาณ PWM ในกรณีนี้ประกอบด้วยโมดูเลเตอร์ PWM ไปยังเอาต์พุตซึ่งอุปกรณ์แยกความแตกต่าง DU และ OB วงจรเรียงกระแสครึ่งคลื่นเชื่อมต่อกัน (ดูภาพ)

นิพจน์เชิงวิเคราะห์ของสัญญาณ PIM มีรูปแบบดังนี้

 - ความกว้างของพัลส์
- ความกว้างของพัลส์
 - ฟังก์ชันอธิบายซองจดหมายของพัลส์การวัด
- ฟังก์ชันอธิบายซองจดหมายของพัลส์การวัด
 - การเบี่ยงเบนของตำแหน่งเวลาของพัลส์การวัด
- การเบี่ยงเบนของตำแหน่งเวลาของพัลส์การวัด
 - คุณค่าของข้อความที่ส่งในช่วงเวลา
- คุณค่าของข้อความที่ส่งในช่วงเวลา 
สเปกตรัมความถี่ของสัญญาณ PIM นั้นยากต่อการวิเคราะห์
ค่าโดยประมาณสำหรับแอมพลิจูดของสัญญาณฮาร์มอนิกที่ส่งในสเปกตรัม PIM คือ:

ที่ไหน  - ความถี่ข้อความ
- ความถี่ข้อความ
 - ระยะเวลาชีพจร
- ระยะเวลาชีพจร
แอมพลิจูดของสัญญาณที่ส่งในสเปกตรัม PWM มีขนาดเล็กมาก (เล็กกว่าในสเปกตรัม AIM และ PWM มาก และเป็นหน้าที่ของความถี่ในการสร้างแบบจำลอง  กล่าวคือบิดเบี้ยว)
กล่าวคือบิดเบี้ยว)
ดังนั้นจึงไม่สามารถจำลองสัญญาณ PPM ที่มีตัวกรองความถี่ต่ำผ่านได้โดยตรง
พวกมันจะถูกแปลงเป็นสัญญาณ AIM หรือ PWM
28. การมอดูเลตความถี่พัลส์ เครื่องตรวจจับสัญญาณชิม
เครื่องตรวจจับสามารถทำได้ตามแบบแผน
ที่ไหน F- ตัวกรองช่องสัญญาณ; JSC- ตัว จำกัด แอมพลิจูด; กระแสตรง-แตกต่าง โซ่; DV- วงจรเรียงกระแสแบบสองครึ่งคลื่นพร้อมโหลดแบบแอคทีฟ OV- เครื่องสั่นเดี่ยว ดี- เครื่องตรวจจับที่มีแรงดันไฟฟ้าเพิ่มขึ้นเป็นสองเท่า LPF-กรองผ่านต่ำ.
อธิบายการทำงานของเครื่องตรวจจับโดยใช้ไดอะแกรมเวลา

หลังจากผ่านวงจรแนร์โรแบนด์ของช่องสัญญาณสื่อสารแล้ว สัญญาณ PFM จะคล้ายกับสัญญาณ FM แบบแอนะล็อก โดยบล็อก AO แอมพลิจูดทั้งสองข้างถูกจำกัดอย่างลึกซึ้ง ดังนั้นพัลส์สี่เหลี่ยมเดียวกันที่มีอัตราการทำซ้ำและระยะเวลาต่างกันจะเกิดขึ้นที่เอาต์พุต ในบล็อก DC พัลส์เหล่านี้มีความแตกต่างกันในเวลาอันเป็นผลมาจากการที่ UDC (t) แสดงถึงส่วนหน้าและส่วนตัด หลังเป็นพัลส์สองขั้วที่แคบมาก ซึ่งจะถูกแปลงในบล็อก DW เป็น Umot(t) แบบ unipolar ซึ่งจะทำให้อัตราการเกิดซ้ำเป็นสองเท่า ในบล็อก OB จะมีการสร้างพัลส์สี่เหลี่ยมที่เหมือนกันในระยะเวลาเดียวกันแต่มีอัตราการทำซ้ำต่างกันซึ่งจะถูกป้อนไปยังอินพุตของบล็อก D แผนผังไดอะแกรมของบล็อก D:

ที่เอาต์พุตของวงจรจะมี Ud(t) ส่งสัญญาณอนาล็อก ในบางกรณี บล็อก OB จะถูกแยกออก ความเสถียรสูงของพารามิเตอร์ของเครื่องตรวจจับนี้นำไปสู่การใช้งานที่หลากหลาย แม้กระทั่งสำหรับสัญญาณ FM แบบอะนาล็อก
การปรับความกว้างพัลส์ คำอธิบาย. แอปพลิเคชัน. (10+)
การปรับความกว้างพัลส์
หนึ่งในแนวทางในการลดการสูญเสียความร้อนขององค์ประกอบกำลังของวงจรคือการใช้โหมดการทำงานแบบสวิตชิ่ง ในโหมดดังกล่าว ส่วนประกอบกำลังเปิดอยู่ จากนั้นแรงดันตกคร่อมเป็นศูนย์ หรือปิด จากนั้นกระแสไฟเป็นศูนย์จะไหลผ่าน กำลังงานกระจายเท่ากับผลคูณของกระแสและแรงดันไฟ ข้อมูลเพิ่มเติมเกี่ยวกับเรื่องนี้ที่ลิงค์ ในโหมดนี้ เป็นไปได้ที่จะบรรลุประสิทธิภาพมากกว่า 80%
เพื่อให้ได้สัญญาณของรูปทรงที่ต้องการที่เอาต์พุต สวิตช์เปิดปิดจะเปิดขึ้นในช่วงเวลาหนึ่งตามสัดส่วนของแรงดันเอาต์พุตที่ต้องการ นี่คือการปรับความกว้างพัลส์ (PWM, PWM) นอกจากนี้สัญญาณดังกล่าวซึ่งประกอบด้วยพัลส์ที่มีความกว้างต่างกันจะเข้าสู่ตัวกรองที่ประกอบด้วยโช้คและตัวเก็บประจุ ที่เอาต์พุตของตัวกรองจะได้รับสัญญาณที่เกือบจะสมบูรณ์แบบของรูปร่างที่ต้องการ
การประยุกต์ใช้การปรับความกว้างพัลส์ (PWM)
ขออภัย ข้อผิดพลาดเกิดขึ้นเป็นระยะในบทความ มีการแก้ไข บทความเพิ่มเติม พัฒนา และเตรียมใหม่ สมัครรับข่าวสารเพื่อรับข่าวสาร
หากไม่ชัดเจน ให้ถาม!
ถามคำถาม. อภิปรายบทความ ข้อความ
บทความเพิ่มเติม
หม้อแปลงไฟฟ้าพัลส์ทรงพลัง การชำระเงิน. คำนวณ. ออนไลน์. โอ้...
การคำนวณออนไลน์ของหม้อแปลงพัลส์กำลัง....
วิธีที่จะไม่สับสนบวกและลบ? การป้องกันขั้วย้อนกลับ โครงการ...
วงจรป้องกันขั้วย้อนกลับ (การกลับขั้ว) ของเครื่องชาร์จ...
อินเวอร์เตอร์เรโซแนนท์, ตัวแปลงเพิ่มแรงดัน. หลักการร...
การประกอบและการปรับตัวแปลงแรงดันไฟฟ้าแบบสเต็ปอัพ คำอธิบายของหลักการทำงาน...
วงจรออสซิลเลเตอร์ โครงการ การชำระเงิน. แอปพลิเคชัน. เสียงก้อง. เรโซแนนท์...
การคำนวณและการประยุกต์ใช้วงจรออสซิลเลเตอร์ ปรากฏการณ์เรโซแนนซ์ ลำดับ...
ตัวแปลงแรงดันพัลส์ไปข้างหน้าอย่างง่าย 5 - 12 วิ...
ไดอะแกรมของตัวแปลงแรงดันไฟฟ้าอย่างง่ายเพื่อจ่ายไฟให้กับแอมพลิฟายเออร์ในการดำเนินงาน....
ตัวแก้ไขตัวประกอบกำลัง โครงการ การชำระเงิน. หลักการทำงาน....
วงจรแก้ไขตัวประกอบกำลัง...
ทำมันด้วยตัวเอง bespereboynik UPS, UPS ทำมันเอง ไซน์ ไซนัส...
วิธีการทำสวิตช์เครื่องสำรองด้วยตัวเอง? แรงดันเอาต์พุตไซน์ล้วนๆ พร้อม...
กำลังไฟฟ้าพัลส์หม้อแปลงไฟฟ้าสำลัก คดเคี้ยว ทำ...
เทคนิคการพันพัลส์โช๊ค / หม้อแปลง ....
ทำไมไฟในโรงหนังถึงดับช้าจัง?
-เนื่องจากผู้ฉายภาพถอดปลั๊กออกช้ามาก
ข้อมูลเบื้องต้นเกี่ยวกับการปรับความกว้างพัลส์
ก่อนหน้านี้ เราได้เรียนรู้วิธีการควบคุม LED โดยการเปลี่ยนสถานะของพอร์ต GPIO เราได้เรียนรู้วิธีควบคุมระยะเวลาและความถี่ของพัลส์ด้วยเอฟเฟกต์แสงที่หลากหลาย เราทำให้แน่ใจว่าหากคุณเปลี่ยนสถานะของพอร์ตด้วยความถี่เสียง คุณจะได้รับความแตกต่าง
เสียง, การมอดูเลตความถี่ที่เชี่ยวชาญ ...
และจะเกิดอะไรขึ้นถ้าเราเปลี่ยนระดับของพอร์ตด้วยความถี่เสียง แต่แทนที่จะเป็นลำโพง เราเชื่อมต่อ LED เพื่อนเก่าในการทดลองของเราเข้าด้วยกัน
ทำการทดลอง แก้ไขโปรแกรม blink.c เพื่อให้ไฟ LED เปิดและปิด 200 ครั้งต่อวินาทีที่ความถี่ 200 Hz เมื่อต้องการทำสิ่งนี้ เพียงแค่เปลี่ยนพารามิเตอร์ของฟังก์ชัน delay() หากต้องการทราบความล่าช้าในการเข้าก็เพียงพอที่จะคำนวณระยะเวลาการแกว่ง T T=1/f. และตั้งแต่ f เท่ากับ 200 Hz จากนั้น T \u003d 1/200 \u003d 0.005 วินาทีหรือ 5 มิลลิวินาที สำหรับ 5 มิลลิวินาทีนี้ เราต้องมีเวลาเปิดไฟ LED และดับไป 1 ครั้ง เนื่องจาก 5 คูณ 2 หารไม่ได้ ลองใช้เวลาเรืองแสง LED ที่ 2 มิลลิวินาที และเวลาไม่เรืองแสงที่ 3 มิลลิวินาที 2+3=5 นั่นคือ ระยะเวลาเต็มของการแกว่งหนึ่งครั้งจะยังคงอยู่ 5ms ตอนนี้เรามาเปลี่ยนโปรแกรมกัน: แทนที่ delay(500) ด้วย delay(2) และ delay(3) สำหรับเปิดและปิด
ไฟ LED ตามลำดับ
มาคอมไพล์โปรแกรมและรันมันกัน หากคุณยังมีลำโพงติดตั้งอยู่ในวงจร คุณจะได้ยินเสียงเบา และหากคุณเปลี่ยนลำโพงเป็น LED คุณจะเห็นไฟ LED ติดสว่างอย่างต่อเนื่อง อันที่จริงไฟ LED กะพริบแน่นอน แต่มันเร็วมากจนตาไม่สังเกตเห็นการกะพริบและรับรู้อีกต่อไป
มันเหมือนเรืองแสงอย่างต่อเนื่อง แต่ดูเหมือนว่าไดโอดจะไม่ส่องแสงเจิดจ้าเหมือนที่เคยเผาไปพร้อมกับเรา สำหรับการเปรียบเทียบ คุณสามารถเรียกใช้โปรแกรมแรกของเรา โดยที่ LED เปิดอยู่ตลอดเวลา และเปรียบเทียบความสว่างของ LED ในทั้งสองกรณี เรามาดูกันว่าทำไมสิ่งนี้ถึงเกิดขึ้นและจะนำไปใช้อย่างไร
จำได้ไหม ในส่วนแรก เราคำนวณตัวต้านทานจำกัดกระแสเพื่อจ่ายไฟให้กับ LED? เรารู้ว่า LED มีกระแสไฟทำงานที่สว่างที่สุด หากกระแสนี้ลดลง ความสว่างของ LED ก็จะลดลงด้วย และเมื่อเราเริ่มเปิดปิด LED อย่างรวดเร็วแล้ว
ความสว่างจะขึ้นอยู่กับกระแสเฉลี่ย (Iср) สำหรับระยะเวลาการแกว่ง สำหรับสัญญาณพัลส์ (รูปตัว P) ที่เราสร้างที่เอาต์พุตของพอร์ต GPIO กระแสเฉลี่ยจะเป็นสัดส่วนกับอัตราส่วน t1 ถึง t2 กล่าวคือ: Iср=In x t1/t2 โดยที่ In คือกระแสไฟที่กำหนดของ LED ซึ่งเราตั้งค่าไว้ที่ 10mA ด้วยตัวต้านทาน ที่พิกัดกระแสไฟ LED จะสว่างที่สุด และในกรณีของเรา Iср = 10 x 2/3 = 6.7 mA เราเห็นแล้วว่ากระแสไฟลดน้อยลง ดังนั้น LED จึงเริ่มสว่างน้อยลง ในสูตรนี้ อัตราส่วน t1/t2 เรียกว่า รอบการทำงานง.
ยิ่งค่าสัมประสิทธิ์นี้มากเท่าใด มูลค่าปัจจุบันเฉลี่ยก็จะยิ่งมากขึ้นเท่านั้น เราสามารถเปลี่ยนอัตราส่วนนี้จาก 0 เป็น 1 หรือจาก 0% เป็น 100% ดังนั้นเราจึงสามารถเปลี่ยนกระแสเฉลี่ยภายในขอบเขตเหล่านี้ได้ ปรากฎว่าด้วยวิธีนี้เราสามารถปรับความสว่างของ LED จากสูงสุดเป็นปิดได้อย่างสมบูรณ์! และแม้ว่าแรงดันไฟฟ้าที่เอาต์พุตของพอร์ตของเราจะยังคงเป็น +3.3V หรือ 0V เท่านั้น แต่กระแสในวงจรของเราสามารถเปลี่ยนแปลงได้ และด้วยการเปลี่ยนกระแสนี้ เราสามารถควบคุมมาลิงกาของเราได้อย่างง่ายดาย การควบคุมแบบนี้เรียกว่า การปรับความกว้างพัลส์หรือเพียงแค่ PWM. ในภาษาอังกฤษฟังดูเหมือน PWM, หรือ P การปรับความกว้างพัลส์. PWM เป็นสัญญาณพัลส์ความถี่คงที่พร้อมวัฏจักรหน้าที่ผันแปร นอกจากนี้ยังใช้คำจำกัดความเช่นสัญญาณพัลส์ของความถี่คงที่พร้อมวัฏจักรหน้าที่ผันแปร รอบการทำงาน S คือส่วนกลับของรอบการทำงานและกำหนดลักษณะอัตราส่วนของช่วงเวลาพัลส์ T ต่อระยะเวลา t1
S=T/t1=1/D.
สำหรับเราในการรวบรวมความรู้ของเราก็ยังคงเขียนโปรแกรมที่จะเปิดและปิด LED ของเราอย่างราบรื่น กระบวนการเปลี่ยนความสว่างของแสงนั้นเรียกว่า ลดแสง.
ฉันได้รับเช่นนี้:
dimmer.c
// โปรแกรมเปลี่ยนความสว่างของ LED อย่างราบรื่น
// LED เชื่อมต่อกับพอร์ต P1_03#include
int หลัก ()
{
ถ้า (!bcm2835_init()) คืนค่า 1;
Bcm2835_gpio_fsel (PIN,BCM2835_GPIO_FSEL_OUTP);
// ตั้งค่าพอร์ต P1_03 เพื่อส่งออก unsigned int t_on, t_off;
// t_on ระยะเวลาของสถานะเปิด = t1 และ t_off- ของสถานะปิด = t2
Int d = 100, i, j, แฟล็ก=0; // d- รอบการทำงานเป็นเปอร์เซ็นต์, i และ j, ตัวแปรเสริมสำหรับรอบการจัดระเบียบ, แฟล็ก- if =0 LED ดับ ถ้า =1 ไฟจะสว่าง
int a=10; // จำนวนรอบการทำงานที่สมบูรณ์
ในขณะที่ (ก)
{
for (j=100; j!=0; j--) //เปลี่ยนตัวประกอบการเติมจาก 100% เป็น 0%
{
t_on=50*d; // หา t1
t_off=50*(100-d); // หา t2
ถ้า (flag==0) d=d-1; // ถ้าไฟ LED จาง ให้ลดรอบการทำงานลง
ถ้า (flag==1) d=d+1; // ถ้าไฟ LED สว่างขึ้น ให้เพิ่มรอบการทำงาน
สำหรับ (i=10; i!=0; i--) //ถ่ายโอน 10 พัลส์ไปยัง LED พร้อมพารามิเตอร์ที่คำนวณได้ t1 และ t2
{
bcm2835_gpio_write (PIN, ต่ำ);
ดีเลย์ไมโครวินาที(t_on);
bcm2835_gpio_write (PIN, สูง);
ดีเลย์ไมโครวินาที(t_off);
}
ถ้า (d==0) แฟล็ก=1; // หากไฟ LED ดับ ให้เริ่มเปิดเครื่อง
ถ้า (d==100) แฟล็ก=0; // ถ้าไฟ LED ถึงขีดสุด เราก็เริ่มดับ
}
อา--;
}
ส่งคืน (!bcm2835_close()); //ออกจากโปรแกรม
}
เราบันทึกโปรแกรมภายใต้ชื่อ dimmer.c คอมไพล์และรัน
อย่างที่คุณเห็น ตอนนี้ไฟ LED ของเราค่อยๆ ดับและสว่างขึ้นอย่างช้าๆ นี่คือวิธีการทำงานของ PWM การปรับความกว้างพัลส์ถูกนำมาใช้ในหลายพื้นที่ ซึ่งรวมถึงการควบคุมความสว่างของหลอดไฟและ LED การควบคุมเซอร์โว การควบคุมแรงดันไฟฟ้าในแหล่งจ่ายไฟแบบสวิตชิ่ง (เช่น อยู่ในคอมพิวเตอร์ของคุณ) ในตัวแปลงดิจิทัลเป็นแอนะล็อกและแอนะล็อกเป็นดิจิทัล เป็นต้น อีกอย่างถ้าเรากลับไปที่วงจรลำโพงของเราด้วยความช่วยเหลือของ PWM คุณสามารถควบคุมระดับเสียงของสัญญาณและโดยการเปลี่ยนความถี่เสียงของมัน
จำเรื่องเล็ก ๆ น้อย ๆ จากคำนำถึงส่วนนี้เกี่ยวกับผู้ฉายภาพอย่างช้าๆดึงปลั๊กออกจากซ็อกเก็ตหรือไม่? ตอนนี้เรารู้แล้วว่าผู้ฉายภาพคนนี้ต้องปิดไฟอย่างราบรื่นตรงกันข้ามต้องเสียบและดึงปลั๊กออกจากซ็อกเก็ตอย่างรวดเร็ว
นี่คือที่ที่เราจะจบบทเรียนนี้ เหลือเพียงการเพิ่มว่า PWM ถูกใช้บ่อยครั้งในแอพพลิเคชั่นต่าง ๆ ที่ผู้ผลิตอุปกรณ์โปรเซสเซอร์มักจะสร้างตัวควบคุม PWM ลงในโปรเซสเซอร์โดยตรง เหล่านั้น. คุณตั้งค่าพารามิเตอร์ของสัญญาณที่คุณต้องการให้กับโปรเซสเซอร์ และตัวประมวลผลเอง ปล่อยสัญญาณที่คุณต้องการโดยไม่ได้รับความช่วยเหลือจากคุณ ในเวลาเดียวกัน โดยไม่ต้องใช้ทรัพยากรซอฟต์แวร์ใดๆ ในการสร้างสัญญาณนี้ Bcm2835 ยังมีฮาร์ดแวร์ PWM ในตัว และ PWM นี้เป็นคุณสมบัติสำรองของพอร์ต GPIO 18 หรือ P1-12 ในการใช้ฮาร์ดแวร์ PWM เราต้องตั้งค่าพอร์ต P1-12 เป็นโหมด ALT5 และตั้งค่าพารามิเตอร์โปรเซสเซอร์ แต่นั่นเป็นเรื่องที่แตกต่างอย่างสิ้นเชิง...